 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAGLNet: Uncertainty-Aggregated Global-Local Fusion Network with Cooperative CNN-Transformer for Building Extraction
Dec 15, 2025Building extraction from remote sensing images is a challenging task due to the complex structure variations of the buildings. Existing methods employ convolutional or self-attention blocks to capture the multi-scale features in the segmentation models, while the inherent gap of the feature pyramids and insufficient global-local feature integration leads to inaccurate, ambiguous extraction results. To address this issue, in this paper, we present an Uncertainty-Aggregated Global-Local Fusion Network (UAGLNet), which is capable to exploit high-quality global-local visual semantics under the guidance of uncertainty modeling. Specifically, we propose a novel cooperative encoder, which adopts hybrid CNN and transformer layers at different stages to capture the local and global visual semantics, respectively. An intermediate cooperative interaction block (CIB) is designed to narrow the gap between the local and global features when the network becomes deeper. Afterwards, we propose a Global-Local Fusion (GLF) module to complementarily fuse the global and local representations. Moreover, to mitigate the segmentation ambiguity in uncertain regions, we propose an Uncertainty-Aggregated Decoder (UAD) to explicitly estimate the pixel-wise uncertainty to enhance the segmentation accuracy. Extensive experiments demonstrate that our method achieves superior performance to other state-of-the-art methods. Our code is available at https://github.com/Dstate/UAGLNet
iVR-GS: Inverse Volume Rendering for Explorable Visualization via Editable 3D Gaussian Splatting
Apr 24, 2025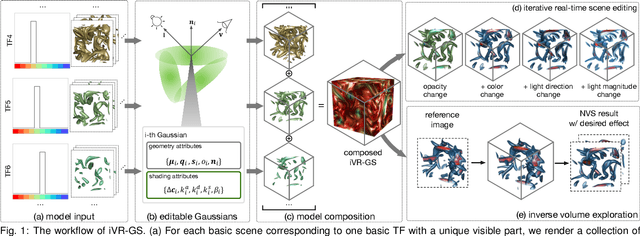
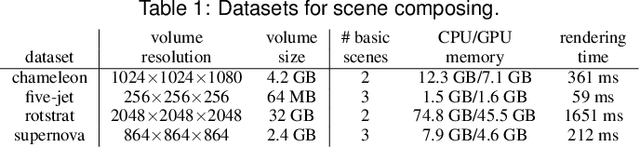
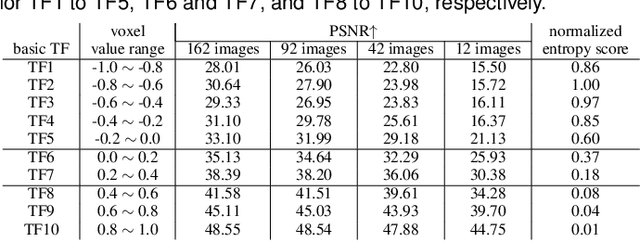
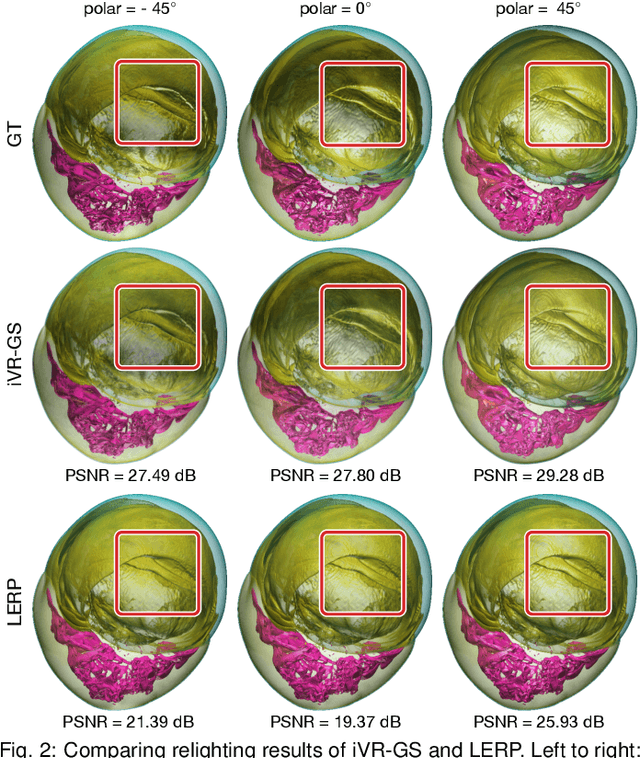
In volume visualization, users can interactively explore the three-dimensional data by specifying color and opacity mappings in the transfer function (TF) or adjusting lighting parameters, facilitating meaningful interpretation of the underlying structure. However, rendering large-scale volumes demands powerful GPUs and high-speed memory access for real-time performance. While existing novel view synthesis (NVS) methods offer faster rendering speeds with lower hardware requirements, the visible parts of a reconstructed scene are fixed and constrained by preset TF settings, significantly limiting user exploration. This paper introduces inverse volume rendering via Gaussian splatting (iVR-GS), an innovative NVS method that reduces the rendering cost while enabling scene editing for interactive volume exploration. Specifically, we compose multiple iVR-GS models associated with basic TFs covering disjoint visible parts to make the entire volumetric scene visible. Each basic model contains a collection of 3D editable Gaussians, where each Gaussian is a 3D spatial point that supports real-time scene rendering and editing. We demonstrate the superior reconstruction quality and composability of iVR-GS against other NVS solutions (Plenoxels, CCNeRF, and base 3DGS) on various volume datasets. The code is available at https://github.com/TouKaienn/iVR-GS.
UncTrack: Reliable Visual Object Tracking with Uncertainty-Aware Prototype Memory Network
Mar 17, 2025
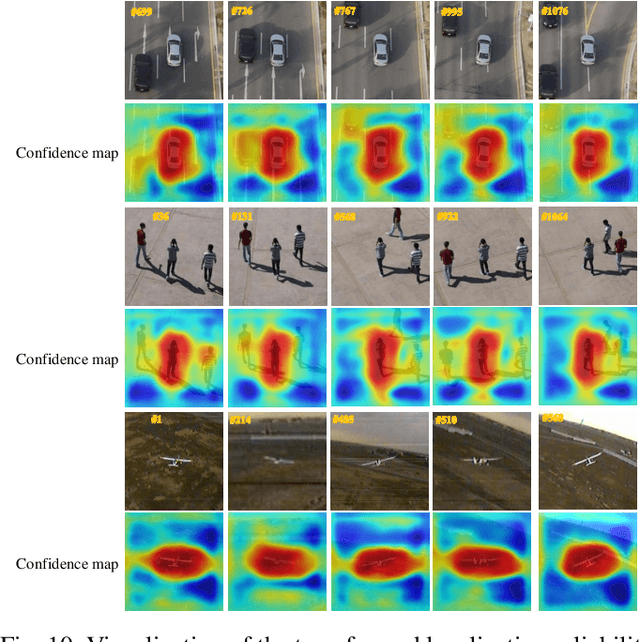

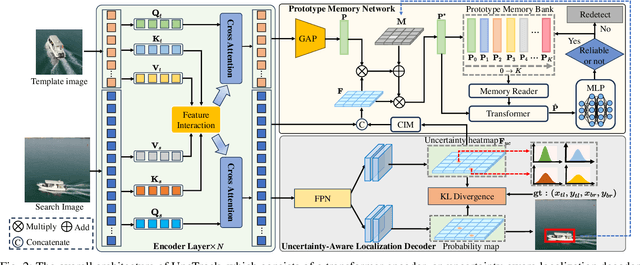
Transformer-based trackers have achieved promising success and become the dominant tracking paradigm due to their accuracy and efficiency. Despite the substantial progress, most of the existing approaches tackle object tracking as a deterministic coordinate regression problem, while the target localization uncertainty has been greatly overlooked, which hampers trackers' ability to maintain reliable target state prediction in challenging scenarios. To address this issue, we propose UncTrack, a novel uncertainty-aware transformer tracker that predicts the target localization uncertainty and incorporates this uncertainty information for accurate target state inference. Specifically, UncTrack utilizes a transformer encoder to perform feature interaction between template and search images. The output features are passed into an uncertainty-aware localization decoder (ULD) to coarsely predict the corner-based localization and the corresponding localization uncertainty. Then the localization uncertainty is sent into a prototype memory network (PMN) to excavate valuable historical information to identify whether the target state prediction is reliable or not. To enhance the template representation, the samples with high confidence are fed back into the prototype memory bank for memory updating, making the tracker more robust to challenging appearance variations. Extensive experiments demonstrate that our method outperforms other state-of-the-art methods. Our code is available at https://github.com/ManOfStory/UncTrack.
Hierarchical Graph Interaction Transformer with Dynamic Token Clustering for Camouflaged Object Detection
Aug 27, 2024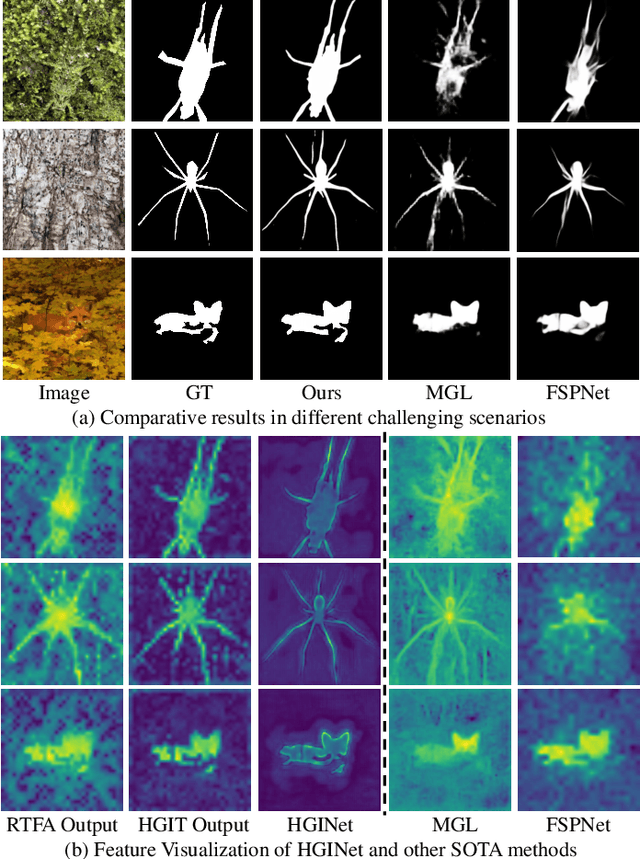
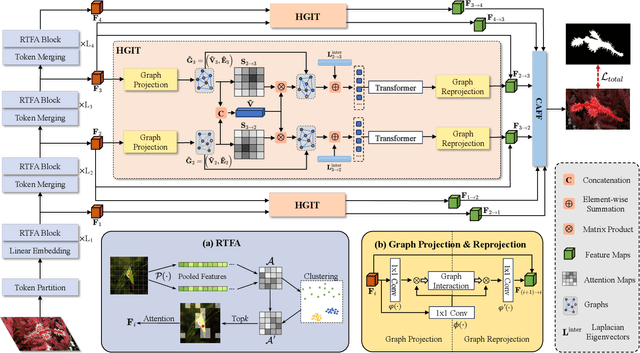
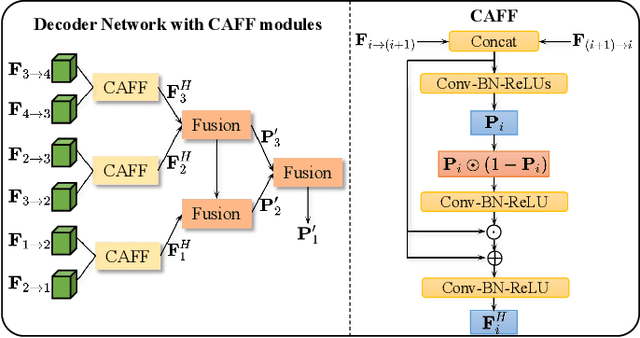
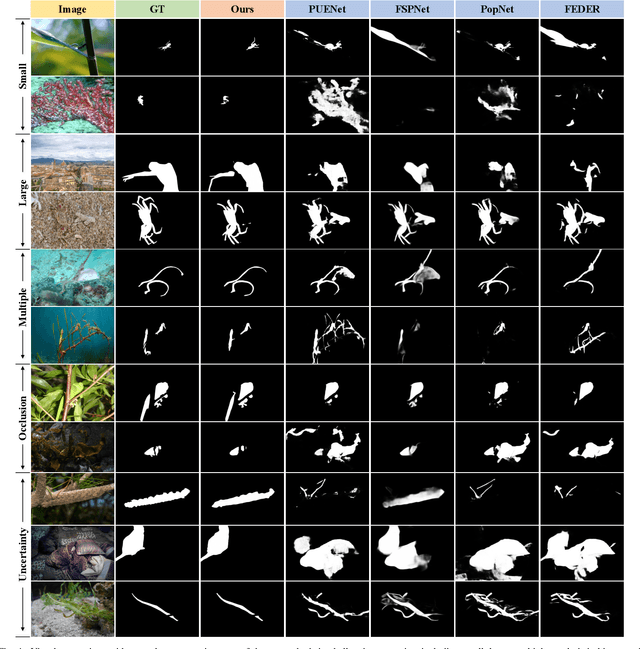
Camouflaged object detection (COD) aims to identify the objects that seamlessly blend into the surrounding backgrounds. Due to the intrinsic similarity between the camouflaged objects and the background region, it is extremely challenging to precisely distinguish the camouflaged objects by existing approaches. In this paper, we propose a hierarchical graph interaction network termed HGINet for camouflaged object detection, which is capable of discovering imperceptible objects via effective graph interaction among the hierarchical tokenized features. Specifically, we first design a region-aware token focusing attention (RTFA) with dynamic token clustering to excavate the potentially distinguishable tokens in the local region. Afterwards, a hierarchical graph interaction transformer (HGIT) is proposed to construct bi-directional aligned communication between hierarchical features in the latent interaction space for visual semantics enhancement. Furthermore, we propose a decoder network with confidence aggregated feature fusion (CAFF) modules, which progressively fuses the hierarchical interacted features to refine the local detail in ambiguous regions. Extensive experiments conducted on the prevalent datasets, i.e. COD10K, CAMO, NC4K and CHAMELEON demonstrate the superior performance of HGINet compared to existing state-of-the-art methods. Our code is available at https://github.com/Garyson1204/HGINet.
A Comparative Study of Neural Surface Reconstruction for Scientific Visualization
Jul 30, 2024This comparative study evaluates various neural surface reconstruction methods, particularly focusing on their implications for scientific visualization through reconstructing 3D surfaces via multi-view rendering images. We categorize ten methods into neural radiance fields and neural implicit surfaces, uncovering the benefits of leveraging distance functions (i.e., SDFs and UDFs) to enhance the accuracy and smoothness of the reconstructed surfaces. Our findings highlight the efficiency and quality of NeuS2 for reconstructing closed surfaces and identify NeUDF as a promising candidate for reconstructing open surfaces despite some limitations. By sharing our benchmark dataset, we invite researchers to test the performance of their methods, contributing to the advancement of surface reconstruction solutions for scientific visualization.
Efficient Adversarial Attacks for Visual Object Tracking
Aug 01, 2020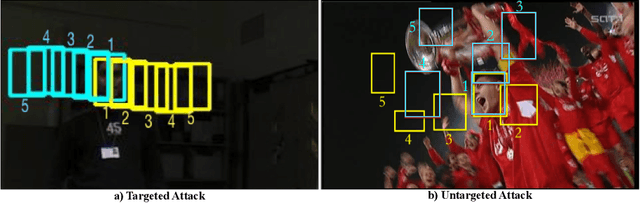
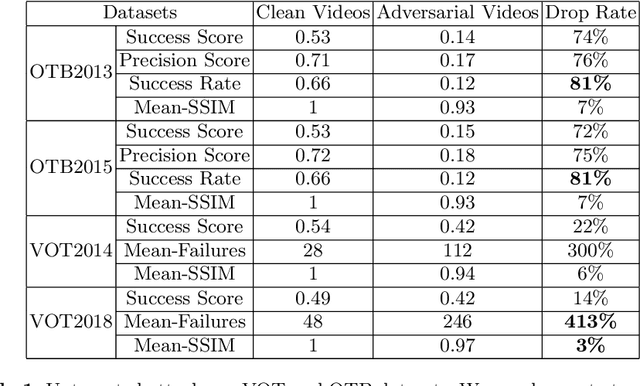


Visual object tracking is an important task that requires the tracker to find the objects quickly and accurately. The existing state-ofthe-art object trackers, i.e., Siamese based trackers, use DNNs to attain high accuracy. However, the robustness of visual tracking models is seldom explored. In this paper, we analyze the weakness of object trackers based on the Siamese network and then extend adversarial examples to visual object tracking. We present an end-to-end network FAN (Fast Attack Network) that uses a novel drift loss combined with the embedded feature loss to attack the Siamese network based trackers. Under a single GPU, FAN is efficient in the training speed and has a strong attack performance. The FAN can generate an adversarial example at 10ms, achieve effective targeted attack (at least 40% drop rate on OTB) and untargeted attack (at least 70% drop rate on OTB).