 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Class Boundary Extraction from Implicit Representations
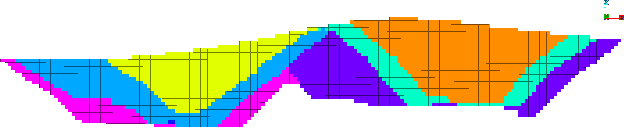
Feb 18, 2026Surface extraction from implicit neural representations modelling a single class surface is a well-known task. However, there exist no surface extraction methods from an implicit representation of multiple classes that guarantee topological correctness and no holes. In this work, we lay the groundwork by introducing a 2D boundary extraction algorithm for the multi-class case focusing on topological consistency and water-tightness, which also allows for setting minimum detail restraint on the approximation. Finally, we evaluate our algorithm using geological modelling data, showcasing its adaptiveness and ability to honour complex topology.
Finding Outliers in a Haystack: Anomaly Detection for Large Pointcloud Scenes
Aug 25, 2025LiDAR scanning in outdoor scenes acquires accurate distance measurements over wide areas, producing large-scale point clouds. Application examples for this data include robotics, automotive vehicles, and land surveillance. During such applications, outlier objects from outside the training data will inevitably appear. Our research contributes a novel approach to open-set segmentation, leveraging the learnings of object defect-detection research. We also draw on the Mamba architecture's strong performance in utilising long-range dependencies and scalability to large data. Combining both, we create a reconstruction based approach for the task of outdoor scene open-set segmentation. We show that our approach improves performance not only when applied to our our own open-set segmentation method, but also when applied to existing methods. Furthermore we contribute a Mamba based architecture which is competitive with existing voxel-convolution based methods on challenging, large-scale pointclouds.
Simultaneous Diffusion Sampling for Conditional LiDAR Generation
Oct 15, 2024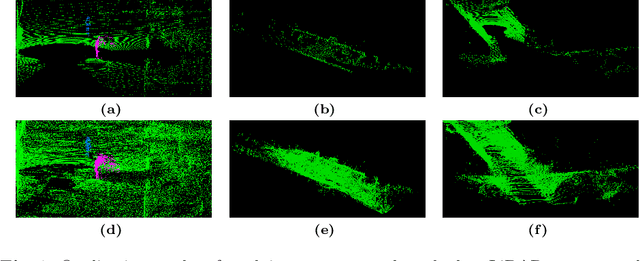
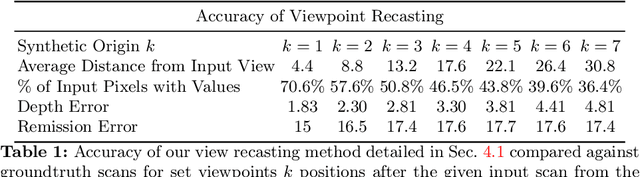
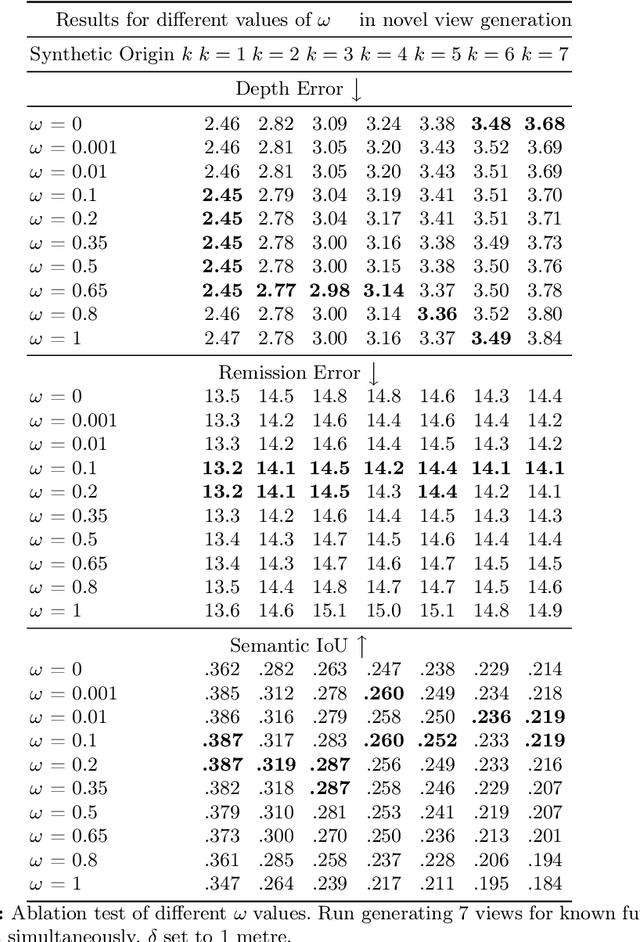
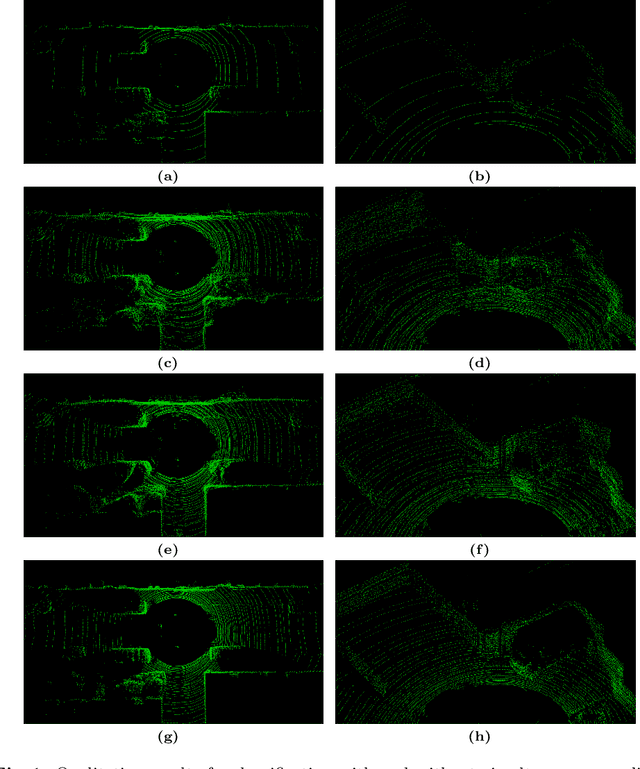
By enabling capturing of 3D point clouds that reflect the geometry of the immediate environment, LiDAR has emerged as a primary sensor for autonomous systems. If a LiDAR scan is too sparse, occluded by obstacles, or too small in range, enhancing the point cloud scan by while respecting the geometry of the scene is useful for downstream tasks. Motivated by the explosive growth of interest in generative methods in vision, conditional LiDAR generation is starting to take off. This paper proposes a novel simultaneous diffusion sampling methodology to generate point clouds conditioned on the 3D structure of the scene as seen from multiple views. The key idea is to impose multi-view geometric constraints on the generation process, exploiting mutual information for enhanced results. Our method begins by recasting the input scan to multiple new viewpoints around the scan, thus creating multiple synthetic LiDAR scans. Then, the synthetic and input LiDAR scans simultaneously undergo conditional generation according to our methodology. Results show that our method can produce accurate and geometrically consistent enhancements to point cloud scans, allowing it to outperform existing methods by a large margin in a variety of benchmarks.
Semantic Segmentation on 3D Point Clouds with High Density Variations
Jul 04, 2023



LiDAR scanning for surveying applications acquire measurements over wide areas and long distances, which produces large-scale 3D point clouds with significant local density variations. While existing 3D semantic segmentation models conduct downsampling and upsampling to build robustness against varying point densities, they are less effective under the large local density variations characteristic of point clouds from surveying applications. To alleviate this weakness, we propose a novel architecture called HDVNet that contains a nested set of encoder-decoder pathways, each handling a specific point density range. Limiting the interconnections between the feature maps enables HDVNet to gauge the reliability of each feature based on the density of a point, e.g., downweighting high density features not existing in low density objects. By effectively handling input density variations, HDVNet outperforms state-of-the-art models in segmentation accuracy on real point clouds with inconsistent density, using just over half the weights.
Improving Confidence in Evolutionary Mine Scheduling via Uncertainty Discounting
May 29, 2023



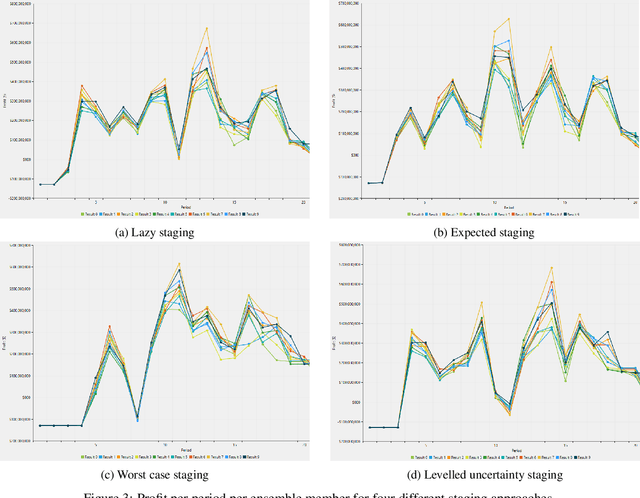
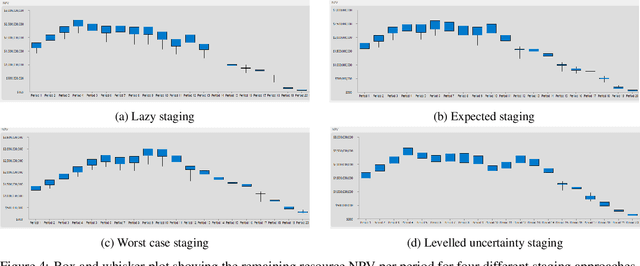
Mine planning is a complex task that involves many uncertainties. During early stage feasibility, available mineral resources can only be estimated based on limited sampling of ore grades from sparse drilling, leading to large uncertainty in under-sampled parts of the deposit. Planning the extraction schedule of ore over the life of a mine is crucial for its economic viability. We introduce a new approach for determining an "optimal schedule under uncertainty" that provides probabilistic bounds on the profits obtained in each period. This treatment of uncertainty within an economic framework reduces previously difficult-to-use models of variability into actionable insights. The new method discounts profits based on uncertainty within an evolutionary algorithm, sacrificing economic optimality of a single geological model for improving the downside risk over an ensemble of equally likely models. We provide experimental studies using Maptek's mine planning software Evolution. Our results show that our new approach is successful for effectively making use of uncertainty information in the mine planning process.
Advanced Ore Mine Optimisation under Uncertainty Using Evolution
Feb 10, 2021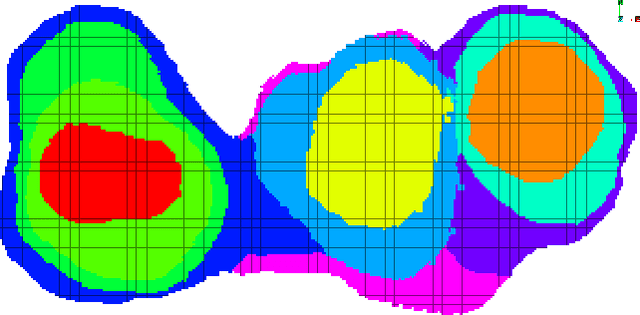
In this paper, we investigate the impact of uncertainty in advanced ore mine optimisation. We consider Maptek's software system Evolution which optimizes extraction sequences based on evolutionary computation techniques and quantify the uncertainty of the obtained solutions with respect to the ore deposit based on predictions obtained by ensembles of neural networks. Furthermore, we investigate the impact of staging on the obtained optimized solutions and discuss a wide range of components for this large scale stochastic optimisation problem which allow to mitigate the uncertainty in the ore deposit while maintaining high profitability.