 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Diffusion Sampling for Conditional LiDAR Generation
Paper and Code
Oct 15, 2024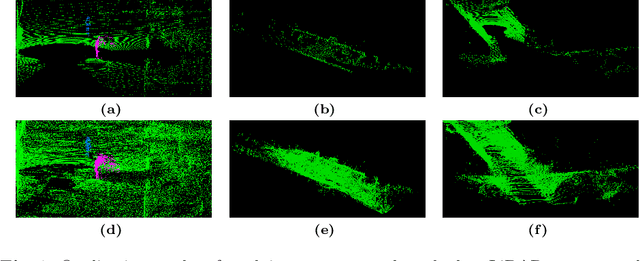
By enabling capturing of 3D point clouds that reflect the geometry of the immediate environment, LiDAR has emerged as a primary sensor for autonomous systems. If a LiDAR scan is too sparse, occluded by obstacles, or too small in range, enhancing the point cloud scan by while respecting the geometry of the scene is useful for downstream tasks. Motivated by the explosive growth of interest in generative methods in vision, conditional LiDAR generation is starting to take off. This paper proposes a novel simultaneous diffusion sampling methodology to generate point clouds conditioned on the 3D structure of the scene as seen from multiple views. The key idea is to impose multi-view geometric constraints on the generation process, exploiting mutual information for enhanced results. Our method begins by recasting the input scan to multiple new viewpoints around the scan, thus creating multiple synthetic LiDAR scans. Then, the synthetic and input LiDAR scans simultaneously undergo conditional generation according to our methodology. Results show that our method can produce accurate and geometrically consistent enhancements to point cloud scans, allowing it to outperform existing methods by a large margin in a variety of benchmarks.