 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBioNeMo Framework: a modular, high-performance library for AI model development in drug discovery
Nov 15, 2024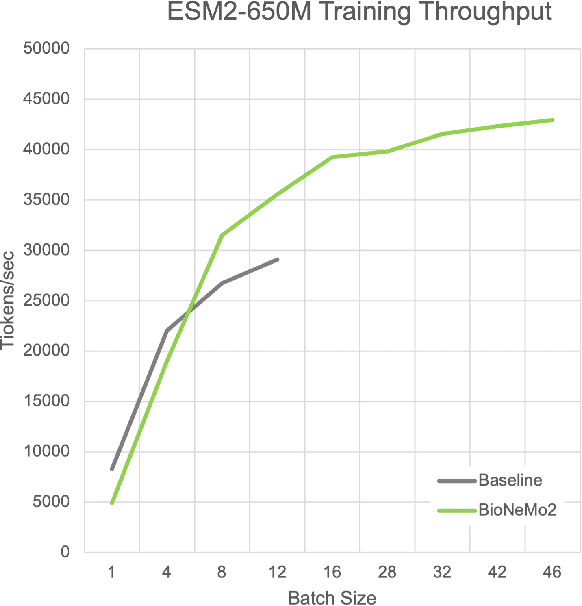
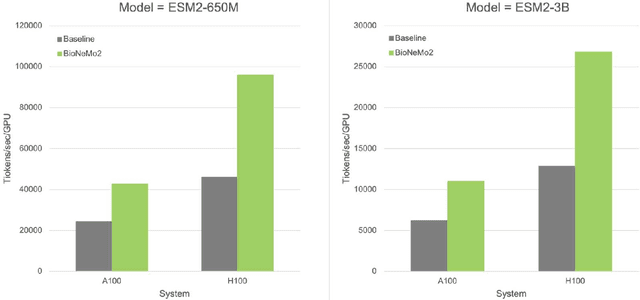
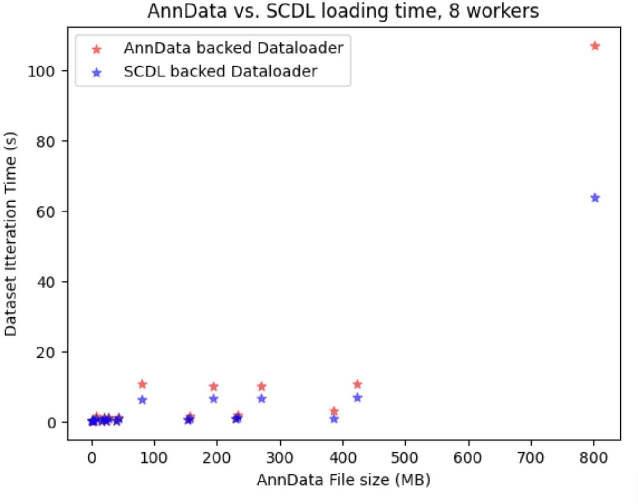
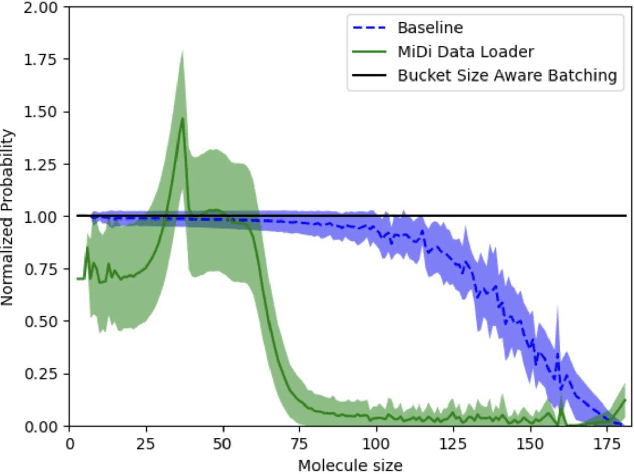
Artificial Intelligence models encoding biology and chemistry are opening new routes to high-throughput and high-quality in-silico drug development. However, their training increasingly relies on computational scale, with recent protein language models (pLM) training on hundreds of graphical processing units (GPUs). We introduce the BioNeMo Framework to facilitate the training of computational biology and chemistry AI models across hundreds of GPUs. Its modular design allows the integration of individual components, such as data loaders, into existing workflows and is open to community contributions. We detail technical features of the BioNeMo Framework through use cases such as pLM pre-training and fine-tuning. On 256 NVIDIA A100s, BioNeMo Framework trains a three billion parameter BERT-based pLM on over one trillion tokens in 4.2 days. The BioNeMo Framework is open-source and free for everyone to use.
Memory-Maze: Scenario Driven Benchmark and Visual Language Navigation Model for Guiding Blind People
May 11, 2024

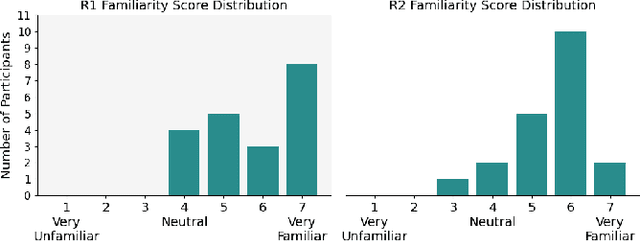
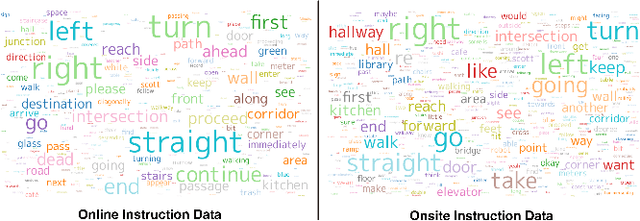
Visual Language Navigation (VLN) powered navigation robots have the potential to guide blind people by understanding and executing route instructions provided by sighted passersby. This capability allows robots to operate in environments that are often unknown a priori. Existing VLN models are insufficient for the scenario of navigation guidance for blind people, as they need to understand routes described from human memory, which frequently contain stutters, errors, and omission of details as opposed to those obtained by thinking out loud, such as in the Room-to-Room dataset. However, currently, there is no benchmark that simulates instructions that were obtained from human memory in environments where blind people navigate. To this end, we present our benchmark, Memory-Maze, which simulates the scenario of seeking route instructions for guiding blind people. Our benchmark contains a maze-like structured virtual environment and novel route instruction data from human memory. To collect natural language instructions, we conducted two studies from sighted passersby onsite and annotators online. Our analysis demonstrates that instructions data collected onsite were more lengthy and contained more varied wording. Alongside our benchmark, we propose a VLN model better equipped to handle the scenario. Our proposed VLN model uses Large Language Models (LLM) to parse instructions and generate Python codes for robot control. We further show that the existing state-of-the-art model performed suboptimally on our benchmark. In contrast, our proposed method outperformed the state-of-the-art model by a fair margin. We found that future research should exercise caution when considering VLN technology for practical applications, as real-world scenarios have different characteristics than ones collected in traditional settings.
"Do it my way!": Impact of Customizations on Trust perceptions in Human-Robot Collaboration
Oct 28, 2023Trust has been shown to be a key factor in effective human-robot collaboration. In the context of assistive robotics, the effect of trust factors on human experience is further pronounced. Personalization of assistive robots is an orthogonal factor positively correlated with robot adoption and user perceptions. In this work, we investigate the relationship between these factors through a within-subjects study (N=17). We provide different levels of customization possibilities over baseline autonomous robot behavior and investigate its impact on trust. Our findings indicate that increased levels of customization was associated with higher trust and comfort perceptions. The assistive robot design process can benefit significantly from our insights for designing trustworthy and customized robots.