 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Virtual-Try-On from a Single Example Image through Deep Inverse Graphics and Learned Differentiable Renderers
May 12, 2022
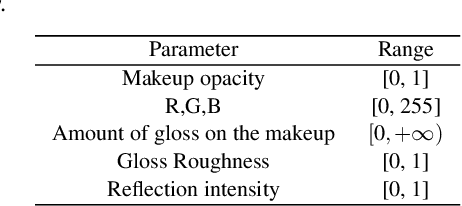
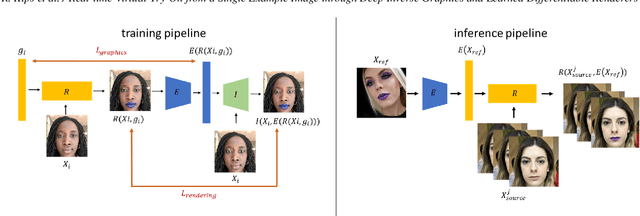
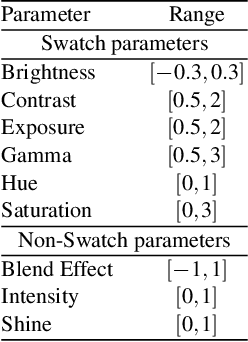
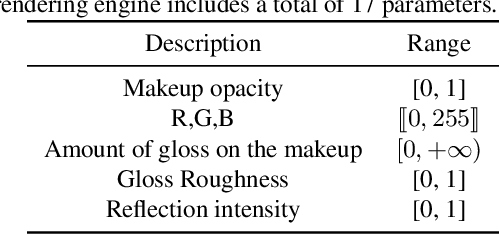
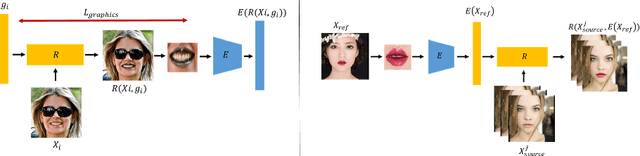
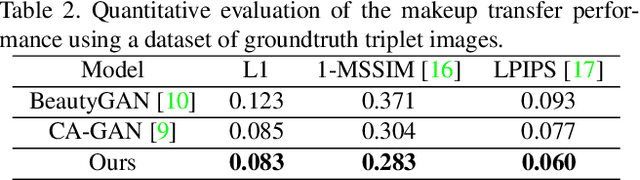
Augmented reality applications have rapidly spread across online platforms, allowing consumers to virtually try-on a variety of products, such as makeup, hair dying, or shoes. However, parametrizing a renderer to synthesize realistic images of a given product remains a challenging task that requires expert knowledge. While recent work has introduced neural rendering methods for virtual try-on from example images, current approaches are based on large generative models that cannot be used in real-time on mobile devices. This calls for a hybrid method that combines the advantages of computer graphics and neural rendering approaches. In this paper we propose a novel framework based on deep learning to build a real-time inverse graphics encoder that learns to map a single example image into the parameter space of a given augmented reality rendering engine. Our method leverages self-supervised learning and does not require labeled training data which makes it extendable to many virtual try-on applications. Furthermore, most augmented reality renderers are not differentiable in practice due to algorithmic choices or implementation constraints to reach real-time on portable devices. To relax the need for a graphics-based differentiable renderer in inverse graphics problems, we introduce a trainable imitator module. Our imitator is a generative network that learns to accurately reproduce the behavior of a given non-differentiable renderer. We propose a novel rendering sensitivity loss to train the imitator, which ensures that the network learns an accurate and continuous representation for each rendering parameter. Our framework enables novel applications where consumers can virtually try-on a novel unknown product from an inspirational reference image on social media. It can also be used by graphics artists to automatically create realistic rendering from a reference product image.
Deep Graphics Encoder for Real-Time Video Makeup Synthesis from Example
May 12, 2021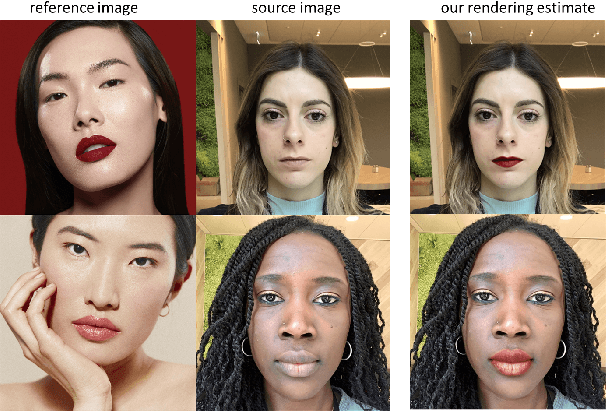
While makeup virtual-try-on is now widespread, parametrizing a computer graphics rendering engine for synthesizing images of a given cosmetics product remains a challenging task. In this paper, we introduce an inverse computer graphics method for automatic makeup synthesis from a reference image, by learning a model that maps an example portrait image with makeup to the space of rendering parameters. This method can be used by artists to automatically create realistic virtual cosmetics image samples, or by consumers, to virtually try-on a makeup extracted from their favorite reference image.
An On-line Variational Bayesian Model for Multi-Person Tracking from Cluttered Scenes
Jun 30, 2016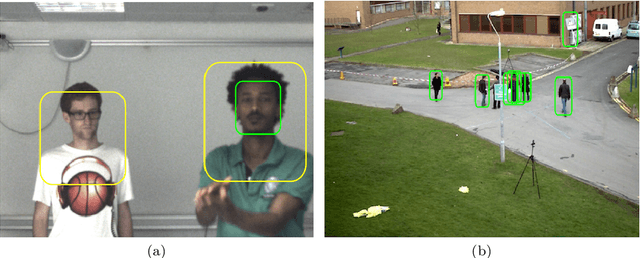
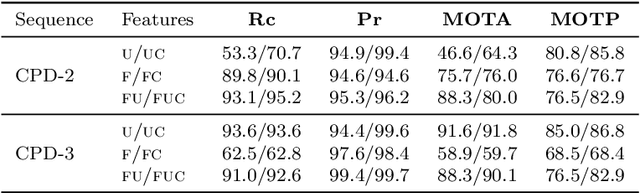
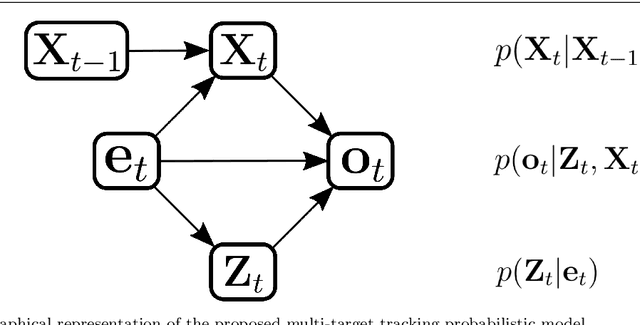
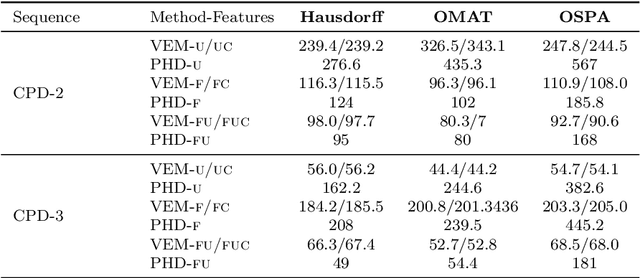
Object tracking is an ubiquitous problem that appears in many applications such as remote sensing, audio processing, computer vision, human-machine interfaces, human-robot interaction, etc. Although thoroughly investigated in computer vision, tracking a time-varying number of persons remains a challenging open problem. In this paper, we propose an on-line variational Bayesian model for multi-person tracking from cluttered visual observations provided by person detectors. The contributions of this paper are the followings. First, we propose a variational Bayesian framework for tracking an unknown and varying number of persons. Second, our model results in a variational expectation-maximization (VEM) algorithm with closed-form expressions for the posterior distributions of the latent variables and for the estimation of the model parameters. Third, the proposed model exploits observations from multiple detectors, and it is therefore multimodal by nature. Finally, we propose to embed both object-birth and object-visibility processes in an effort to robustly handle person appearances and disappearances over time. Evaluated on classical multiple person tracking datasets, our method shows competitive results with respect to state-of-the-art multiple-object tracking models, such as the probability hypothesis density (PHD) filter among others.
* 21 pages, 9 figures, 4 tables
Hyper-Spectral Image Analysis with Partially-Latent Regression and Spatial Markov Dependencies
Mar 27, 2015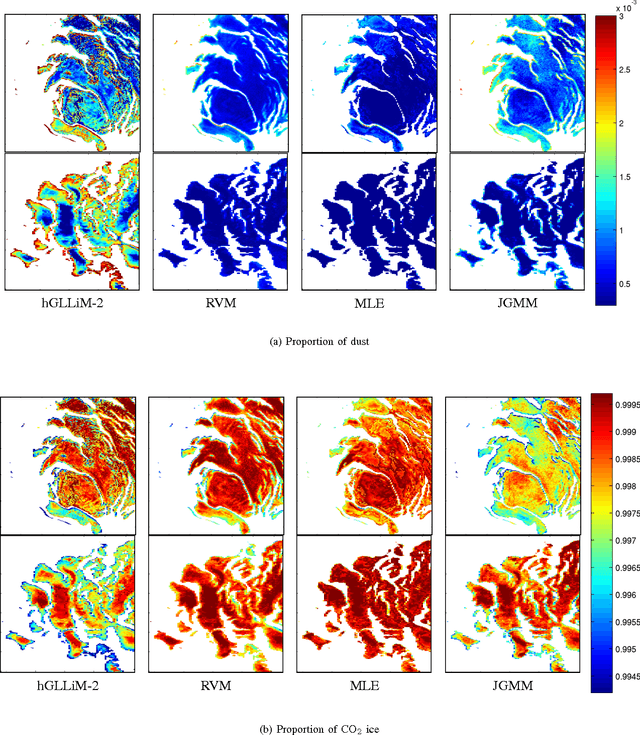
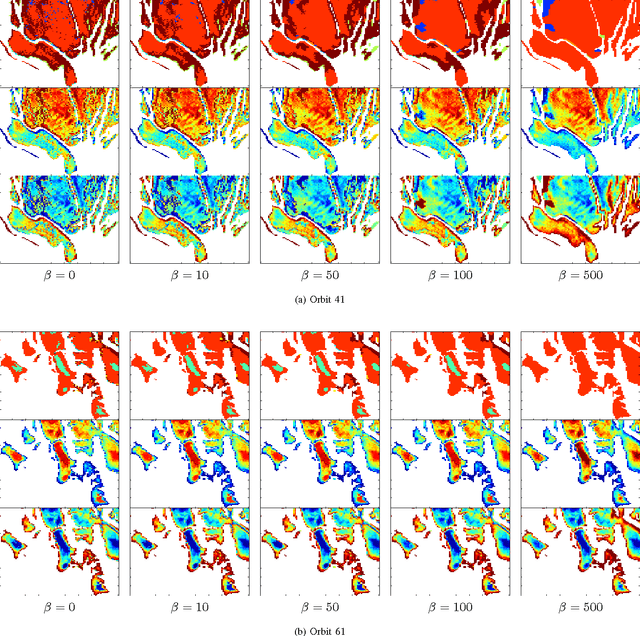
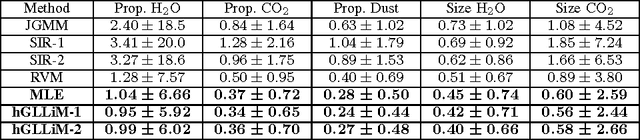
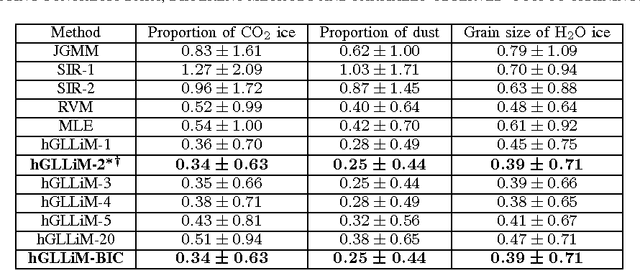
Hyper-spectral data can be analyzed to recover physical properties at large planetary scales. This involves resolving inverse problems which can be addressed within machine learning, with the advantage that, once a relationship between physical parameters and spectra has been established in a data-driven fashion, the learned relationship can be used to estimate physical parameters for new hyper-spectral observations. Within this framework, we propose a spatially-constrained and partially-latent regression method which maps high-dimensional inputs (hyper-spectral images) onto low-dimensional responses (physical parameters such as the local chemical composition of the soil). The proposed regression model comprises two key features. Firstly, it combines a Gaussian mixture of locally-linear mappings (GLLiM) with a partially-latent response model. While the former makes high-dimensional regression tractable, the latter enables to deal with physical parameters that cannot be observed or, more generally, with data contaminated by experimental artifacts that cannot be explained with noise models. Secondly, spatial constraints are introduced in the model through a Markov random field (MRF) prior which provides a spatial structure to the Gaussian-mixture hidden variables. Experiments conducted on a database composed of remotely sensed observations collected from the Mars planet by the Mars Express orbiter demonstrate the effectiveness of the proposed model.
* 12 pages, 4 figures, 3 tables