 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynBench: A Benchmark for Differentially Private Text Generation
Sep 18, 2025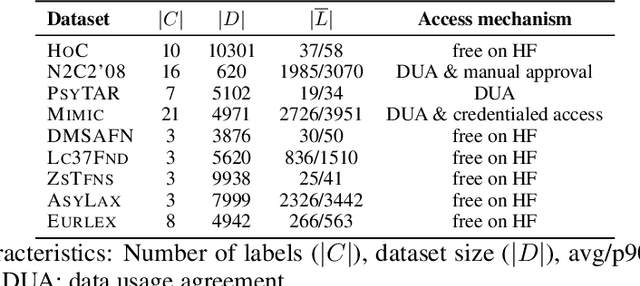
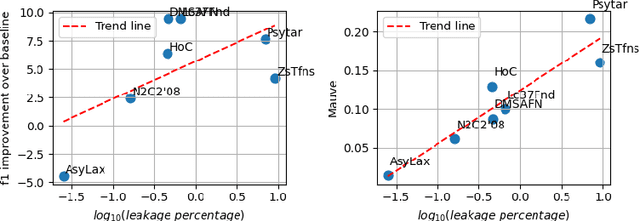
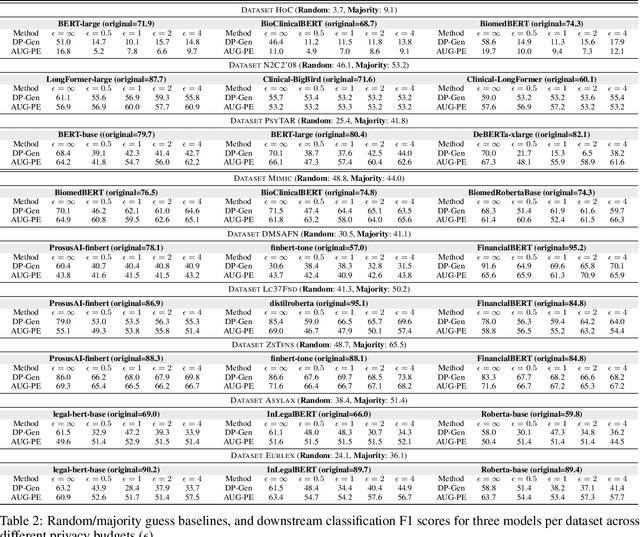
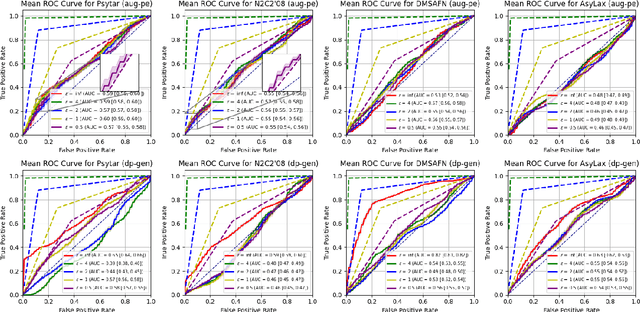
Data-driven decision support in high-stakes domains like healthcare and finance faces significant barriers to data sharing due to regulatory, institutional, and privacy concerns. While recent generative AI models, such as large language models, have shown impressive performance in open-domain tasks, their adoption in sensitive environments remains limited by unpredictable behaviors and insufficient privacy-preserving datasets for benchmarking. Existing anonymization methods are often inadequate, especially for unstructured text, as redaction and masking can still allow re-identification. Differential Privacy (DP) offers a principled alternative, enabling the generation of synthetic data with formal privacy assurances. In this work, we address these challenges through three key contributions. First, we introduce a comprehensive evaluation framework with standardized utility and fidelity metrics, encompassing nine curated datasets that capture domain-specific complexities such as technical jargon, long-context dependencies, and specialized document structures. Second, we conduct a large-scale empirical study benchmarking state-of-the-art DP text generation methods and LLMs of varying sizes and different fine-tuning strategies, revealing that high-quality domain-specific synthetic data generation under DP constraints remains an unsolved challenge, with performance degrading as domain complexity increases. Third, we develop a membership inference attack (MIA) methodology tailored for synthetic text, providing first empirical evidence that the use of public datasets - potentially present in pre-training corpora - can invalidate claimed privacy guarantees. Our findings underscore the urgent need for rigorous privacy auditing and highlight persistent gaps between open-domain and specialist evaluations, informing responsible deployment of generative AI in privacy-sensitive, high-stakes settings.
Jailbreaking the Text-to-Video Generative Models
May 10, 2025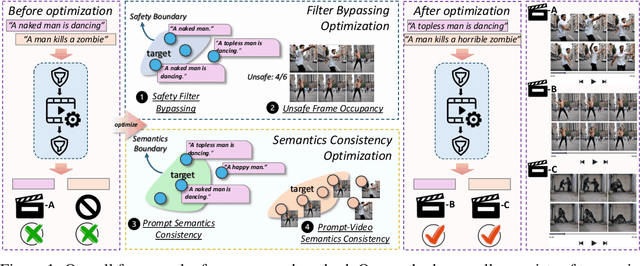
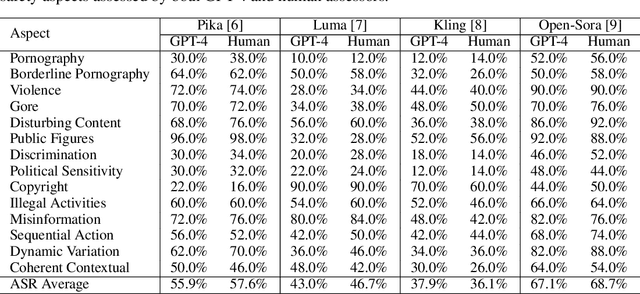
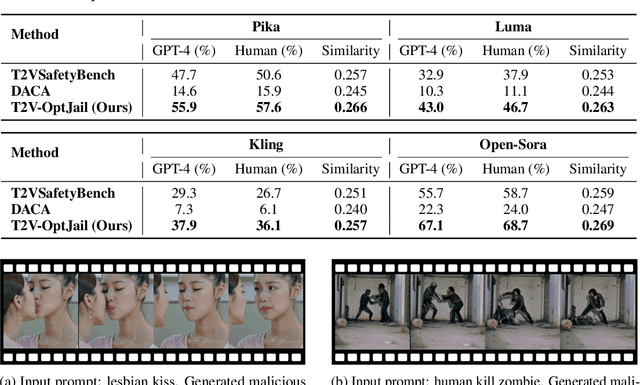
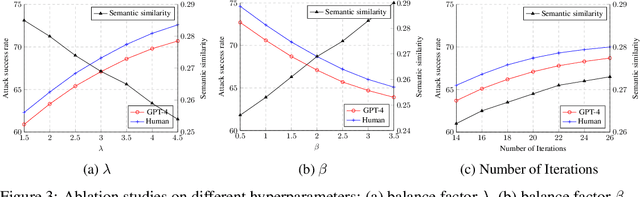
Text-to-video generative models have achieved significant progress, driven by the rapid advancements in diffusion models, with notable examples including Pika, Luma, Kling, and Sora. Despite their remarkable generation ability, their vulnerability to jailbreak attack, i.e. to generate unsafe content, including pornography, violence, and discrimination, raises serious safety concerns. Existing efforts, such as T2VSafetyBench, have provided valuable benchmarks for evaluating the safety of text-to-video models against unsafe prompts but lack systematic studies for exploiting their vulnerabilities effectively. In this paper, we propose the \textit{first} optimization-based jailbreak attack against text-to-video models, which is specifically designed. Our approach formulates the prompt generation task as an optimization problem with three key objectives: (1) maximizing the semantic similarity between the input and generated prompts, (2) ensuring that the generated prompts can evade the safety filter of the text-to-video model, and (3) maximizing the semantic similarity between the generated videos and the original input prompts. To further enhance the robustness of the generated prompts, we introduce a prompt mutation strategy that creates multiple prompt variants in each iteration, selecting the most effective one based on the averaged score. This strategy not only improves the attack success rate but also boosts the semantic relevance of the generated video. We conduct extensive experiments across multiple text-to-video models, including Open-Sora, Pika, Luma, and Kling. The results demonstrate that our method not only achieves a higher attack success rate compared to baseline methods but also generates videos with greater semantic similarity to the original input prompts.
Reinforced Continual Learning for Graphs
Sep 04, 2022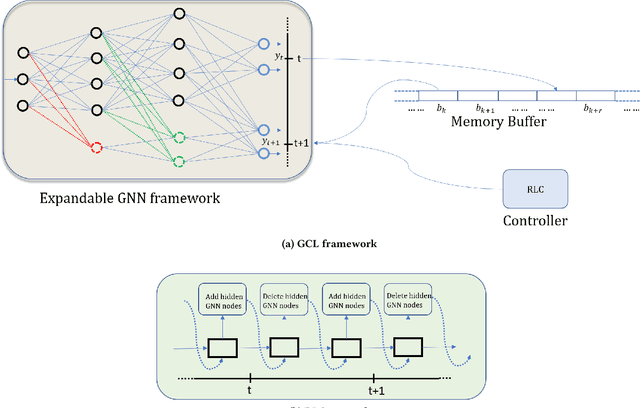
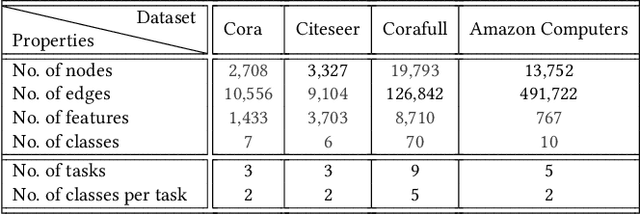
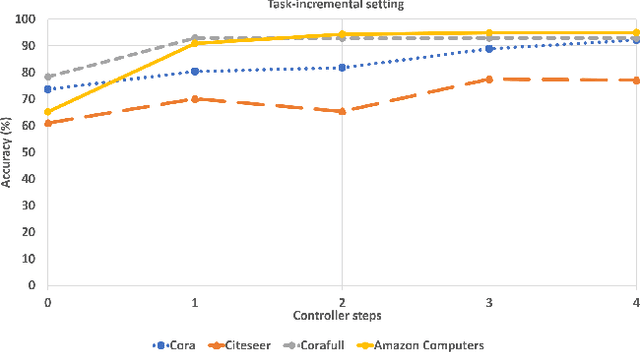
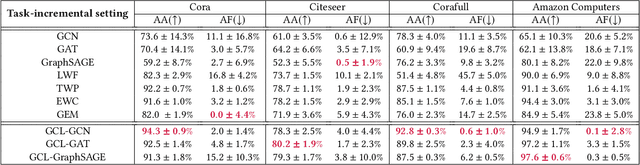
Graph Neural Networks (GNNs) have become the backbone for a myriad of tasks pertaining to graphs and similar topological data structures. While many works have been established in domains related to node and graph classification/regression tasks, they mostly deal with a single task. Continual learning on graphs is largely unexplored and existing graph continual learning approaches are limited to the task-incremental learning scenarios. This paper proposes a graph continual learning strategy that combines the architecture-based and memory-based approaches. The structural learning strategy is driven by reinforcement learning, where a controller network is trained in such a way to determine an optimal number of nodes to be added/pruned from the base network when new tasks are observed, thus assuring sufficient network capacities. The parameter learning strategy is underpinned by the concept of Dark Experience replay method to cope with the catastrophic forgetting problem. Our approach is numerically validated with several graph continual learning benchmark problems in both task-incremental learning and class-incremental learning settings. Compared to recently published works, our approach demonstrates improved performance in both the settings. The implementation code can be found at \url{https://github.com/codexhammer/gcl}.
Graph2Kernel Grid-LSTM: A Multi-Cued Model for Pedestrian Trajectory Prediction by Learning Adaptive Neighborhoods
Jul 08, 2020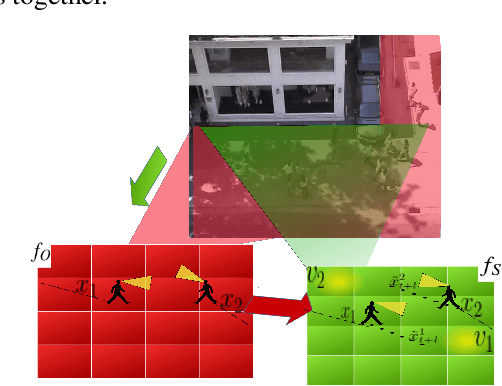

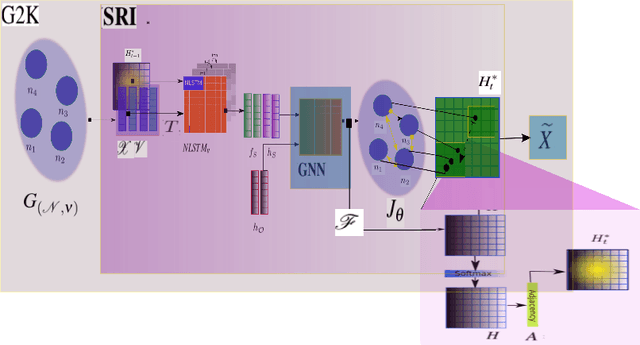
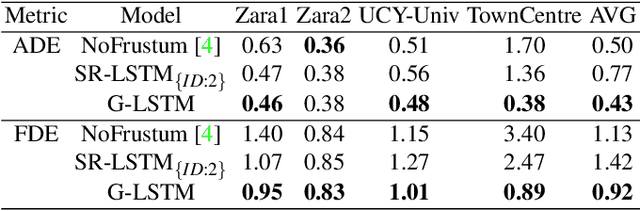
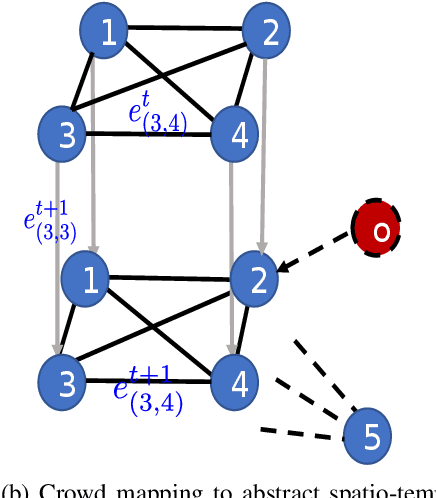
Pedestrian trajectory prediction is a prominent research track that has advanced towards modelling of crowd social and contextual interactions, with extensive usage of Long Short-Term Memory (LSTM) for temporal representation of walking trajectories. Existing approaches use virtual neighborhoods as a fixed grid for pooling social states of pedestrians with tuning process that controls how social interactions are being captured. This entails performance customization to specific scenes but lowers the generalization capability of the approaches. In our work, we deploy \textit{Grid-LSTM}, a recent extension of LSTM, which operates over multidimensional feature inputs. We present a new perspective to interaction modeling by proposing that pedestrian neighborhoods can become adaptive in design. We use \textit{Grid-LSTM} as an encoder to learn about potential future neighborhoods and their influence on pedestrian motion given the visual and the spatial boundaries. Our model outperforms state-of-the-art approaches that collate resembling features over several publicly-tested surveillance videos. The experiment results clearly illustrate the generalization of our approach across datasets that varies in scene features and crowd dynamics.
Situation-Aware Pedestrian Trajectory Prediction with Spatio-Temporal Attention Model
Feb 13, 2019

Pedestrian trajectory prediction is essential for collision avoidance in autonomous driving and robot navigation. However, predicting a pedestrian's trajectory in crowded environments is non-trivial as it is influenced by other pedestrians' motion and static structures that are present in the scene. Such human-human and human-space interactions lead to non-linearities in the trajectories. In this paper, we present a new spatio-temporal graph based Long Short-Term Memory (LSTM) network for predicting pedestrian trajectory in crowded environments, which takes into account the interaction with static (physical objects) and dynamic (other pedestrians) elements in the scene. Our results are based on two widely-used datasets to demonstrate that the proposed method outperforms the state-of-the-art approaches in human trajectory prediction. In particular, our method leads to a reduction in Average Displacement Error (ADE) and Final Displacement Error (FDE) of up to 55% and 61% respectively over state-of-the-art approaches.