 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaS&S: a One-Shot Supernet Approach for Automatic Embedding Size Search in Deep Recommender System
Nov 12, 2024



Deep Learning Recommendation Model(DLRM)s utilize the embedding layer to represent various categorical features. Traditional DLRMs adopt unified embedding size for all features, leading to suboptimal performance and redundant parameters. Thus, lots of Automatic Embedding size Search (AES) works focus on obtaining mixed embedding sizes with strong model performance. However, previous AES works can hardly address several challenges together: (1) The search results of embedding sizes are unstable; (2) Recommendation effect with AES results is unsatisfactory; (3) Memory cost of embeddings is uncontrollable. To address these challenges, we propose a novel one-shot AES framework called AdaS&S, in which a supernet encompassing various candidate embeddings is built and AES is performed as searching network architectures within it. Our framework contains two main stages: In the first stage, we decouple training parameters from searching embedding sizes, and propose the Adaptive Sampling method to yield a well-trained supernet, which further helps to produce stable AES results. In the second stage, to obtain embedding sizes that benefits the model effect, we design a reinforcement learning search process which utilizes the supernet trained previously. Meanwhile, to adapt searching to specific resource constraint, we introduce the resource competition penalty to balance the model effectiveness and memory cost of embeddings. We conduct extensive experiments on public datasets to show the superiority of AdaS&S. Our method could improve AUC by about 0.3% while saving about 20% of model parameters. Empirical analysis also shows that the stability of searching results in AdaS&S significantly exceeds other methods.
Situation-Aware Pedestrian Trajectory Prediction with Spatio-Temporal Attention Model
Feb 13, 2019

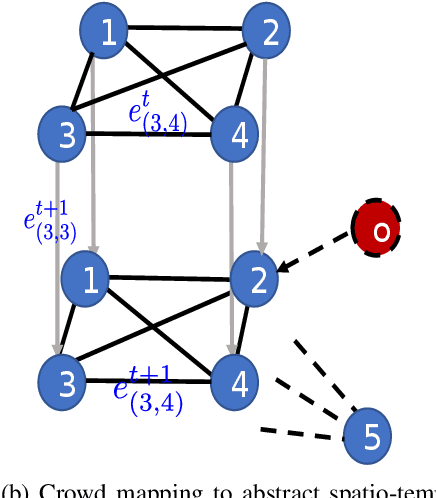
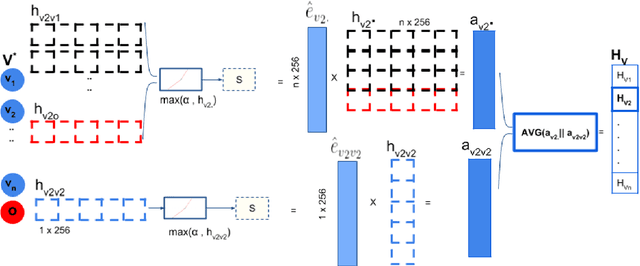
Pedestrian trajectory prediction is essential for collision avoidance in autonomous driving and robot navigation. However, predicting a pedestrian's trajectory in crowded environments is non-trivial as it is influenced by other pedestrians' motion and static structures that are present in the scene. Such human-human and human-space interactions lead to non-linearities in the trajectories. In this paper, we present a new spatio-temporal graph based Long Short-Term Memory (LSTM) network for predicting pedestrian trajectory in crowded environments, which takes into account the interaction with static (physical objects) and dynamic (other pedestrians) elements in the scene. Our results are based on two widely-used datasets to demonstrate that the proposed method outperforms the state-of-the-art approaches in human trajectory prediction. In particular, our method leads to a reduction in Average Displacement Error (ADE) and Final Displacement Error (FDE) of up to 55% and 61% respectively over state-of-the-art approaches.