 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Cross-Device Localization via Neural Metric Learning and Feature Fusion
Jan 30, 2026We present a hybrid cross-device localization pipeline developed for the CroCoDL 2025 Challenge. Our approach integrates a shared retrieval encoder and two complementary localization branches: a classical geometric branch using feature fusion and PnP, and a neural feed-forward branch (MapAnything) for metric localization conditioned on geometric inputs. A neural-guided candidate pruning strategy further filters unreliable map frames based on translation consistency, while depth-conditioned localization refines metric scale and translation precision on Spot scenes. These components jointly lead to significant improvements in recall and accuracy across both HYDRO and SUCCU benchmarks. Our method achieved a final score of 92.62 (R@0.5m, 5°) during the challenge.
MACE: Mixture-of-Experts Accelerated Coordinate Encoding for Large-Scale Scene Localization and Rendering
Oct 16, 2025Efficient localization and high-quality rendering in large-scale scenes remain a significant challenge due to the computational cost involved. While Scene Coordinate Regression (SCR) methods perform well in small-scale localization, they are limited by the capacity of a single network when extended to large-scale scenes. To address these challenges, we propose the Mixed Expert-based Accelerated Coordinate Encoding method (MACE), which enables efficient localization and high-quality rendering in large-scale scenes. Inspired by the remarkable capabilities of MOE in large model domains, we introduce a gating network to implicitly classify and select sub-networks, ensuring that only a single sub-network is activated during each inference. Furtheremore, we present Auxiliary-Loss-Free Load Balancing(ALF-LB) strategy to enhance the localization accuracy on large-scale scene. Our framework provides a significant reduction in costs while maintaining higher precision, offering an efficient solution for large-scale scene applications. Additional experiments on the Cambridge test set demonstrate that our method achieves high-quality rendering results with merely 10 minutes of training.
MegLoc: A Robust and Accurate Visual Localization Pipeline
Nov 25, 2021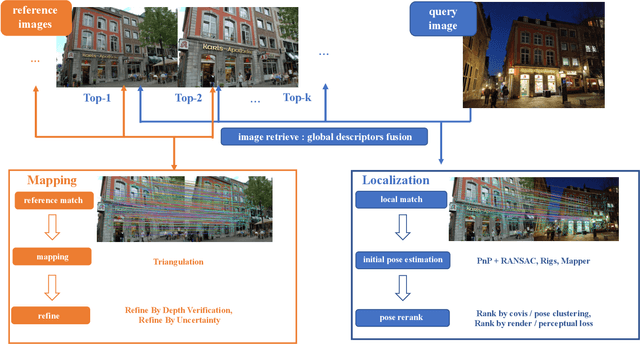
In this paper, we present a visual localization pipeline, namely MegLoc, for robust and accurate 6-DoF pose estimation under varying scenarios, including indoor and outdoor scenes, different time across a day, different seasons across a year, and even across years. MegLoc achieves state-of-the-art results on a range of challenging datasets, including winning the Outdoor and Indoor Visual Localization Challenge of ICCV 2021 Workshop on Long-term Visual Localization under Changing Conditions, as well as the Re-localization Challenge for Autonomous Driving of ICCV 2021 Workshop on Map-based Localization for Autonomous Driving.