Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMegLoc: A Robust and Accurate Visual Localization Pipeline
Nov 25, 2021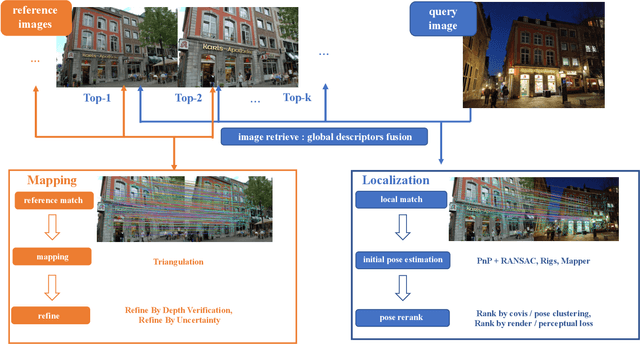
In this paper, we present a visual localization pipeline, namely MegLoc, for robust and accurate 6-DoF pose estimation under varying scenarios, including indoor and outdoor scenes, different time across a day, different seasons across a year, and even across years. MegLoc achieves state-of-the-art results on a range of challenging datasets, including winning the Outdoor and Indoor Visual Localization Challenge of ICCV 2021 Workshop on Long-term Visual Localization under Changing Conditions, as well as the Re-localization Challenge for Autonomous Driving of ICCV 2021 Workshop on Map-based Localization for Autonomous Driving.
Via