 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaking Avatars Interact: Towards Text-Driven Human-Object Interaction for Controllable Talking Avatars
Feb 02, 2026Generating talking avatars is a fundamental task in video generation. Although existing methods can generate full-body talking avatars with simple human motion, extending this task to grounded human-object interaction (GHOI) remains an open challenge, requiring the avatar to perform text-aligned interactions with surrounding objects. This challenge stems from the need for environmental perception and the control-quality dilemma in GHOI generation. To address this, we propose a novel dual-stream framework, InteractAvatar, which decouples perception and planning from video synthesis for grounded human-object interaction. Leveraging detection to enhance environmental perception, we introduce a Perception and Interaction Module (PIM) to generate text-aligned interaction motions. Additionally, an Audio-Interaction Aware Generation Module (AIM) is proposed to synthesize vivid talking avatars performing object interactions. With a specially designed motion-to-video aligner, PIM and AIM share a similar network structure and enable parallel co-generation of motions and plausible videos, effectively mitigating the control-quality dilemma. Finally, we establish a benchmark, GroundedInter, for evaluating GHOI video generation. Extensive experiments and comparisons demonstrate the effectiveness of our method in generating grounded human-object interactions for talking avatars. Project page: https://interactavatar.github.io
GGTalker: Talking Head Systhesis with Generalizable Gaussian Priors and Identity-Specific Adaptation
Jun 26, 2025Creating high-quality, generalizable speech-driven 3D talking heads remains a persistent challenge. Previous methods achieve satisfactory results for fixed viewpoints and small-scale audio variations, but they struggle with large head rotations and out-of-distribution (OOD) audio. Moreover, they are constrained by the need for time-consuming, identity-specific training. We believe the core issue lies in the lack of sufficient 3D priors, which limits the extrapolation capabilities of synthesized talking heads. To address this, we propose GGTalker, which synthesizes talking heads through a combination of generalizable priors and identity-specific adaptation. We introduce a two-stage Prior-Adaptation training strategy to learn Gaussian head priors and adapt to individual characteristics. We train Audio-Expression and Expression-Visual priors to capture the universal patterns of lip movements and the general distribution of head textures. During the Customized Adaptation, individual speaking styles and texture details are precisely modeled. Additionally, we introduce a color MLP to generate fine-grained, motion-aligned textures and a Body Inpainter to blend rendered results with the background, producing indistinguishable, photorealistic video frames. Comprehensive experiments show that GGTalker achieves state-of-the-art performance in rendering quality, 3D consistency, lip-sync accuracy, and training efficiency.
SC-wLS: Towards Interpretable Feed-forward Camera Re-localization
Oct 23, 2022Visual re-localization aims to recover camera poses in a known environment, which is vital for applications like robotics or augmented reality. Feed-forward absolute camera pose regression methods directly output poses by a network, but suffer from low accuracy. Meanwhile, scene coordinate based methods are accurate, but need iterative RANSAC post-processing, which brings challenges to efficient end-to-end training and inference. In order to have the best of both worlds, we propose a feed-forward method termed SC-wLS that exploits all scene coordinate estimates for weighted least squares pose regression. This differentiable formulation exploits a weight network imposed on 2D-3D correspondences, and requires pose supervision only. Qualitative results demonstrate the interpretability of learned weights. Evaluations on 7Scenes and Cambridge datasets show significantly promoted performance when compared with former feed-forward counterparts. Moreover, our SC-wLS method enables a new capability: self-supervised test-time adaptation on the weight network. Codes and models are publicly available.
Generalizing to the Open World: Deep Visual Odometry with Online Adaptation
Mar 29, 2021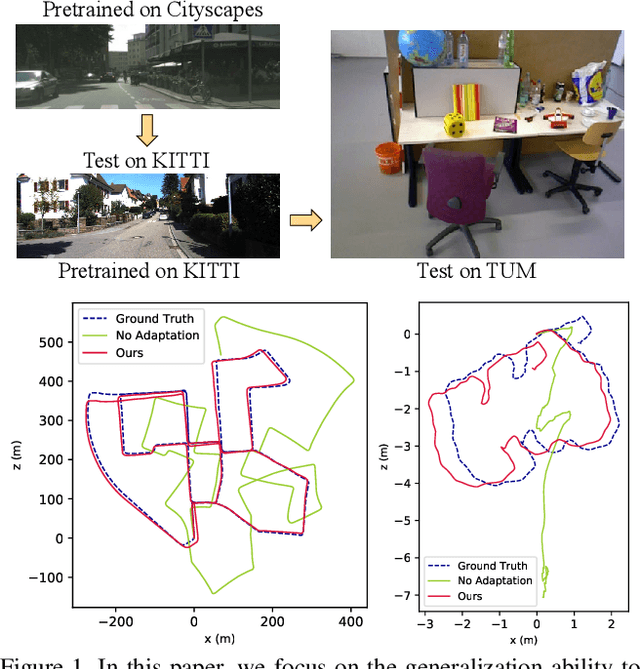
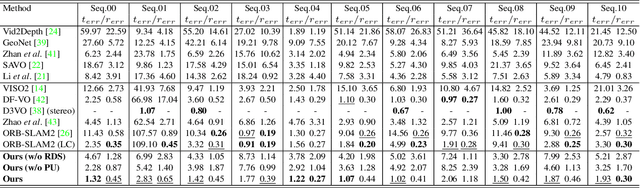
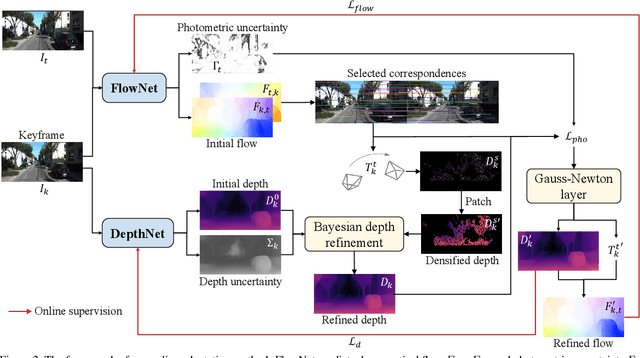
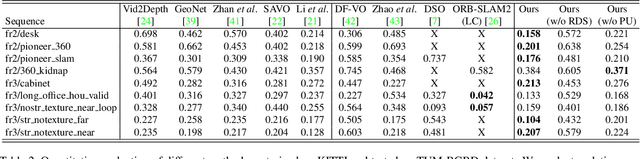
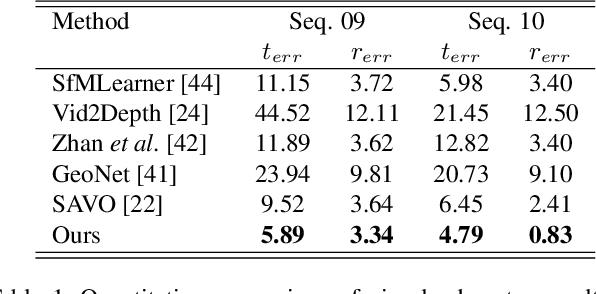
Despite learning-based visual odometry (VO) has shown impressive results in recent years, the pretrained networks may easily collapse in unseen environments. The large domain gap between training and testing data makes them difficult to generalize to new scenes. In this paper, we propose an online adaptation framework for deep VO with the assistance of scene-agnostic geometric computations and Bayesian inference. In contrast to learning-based pose estimation, our method solves pose from optical flow and depth while the single-view depth estimation is continuously improved with new observations by online learned uncertainties. Meanwhile, an online learned photometric uncertainty is used for further depth and pose optimization by a differentiable Gauss-Newton layer. Our method enables fast adaptation of deep VO networks to unseen environments in a self-supervised manner. Extensive experiments including Cityscapes to KITTI and outdoor KITTI to indoor TUM demonstrate that our method achieves state-of-the-art generalization ability among self-supervised VO methods.
Self-Supervised Deep Visual Odometry with Online Adaptation
May 13, 2020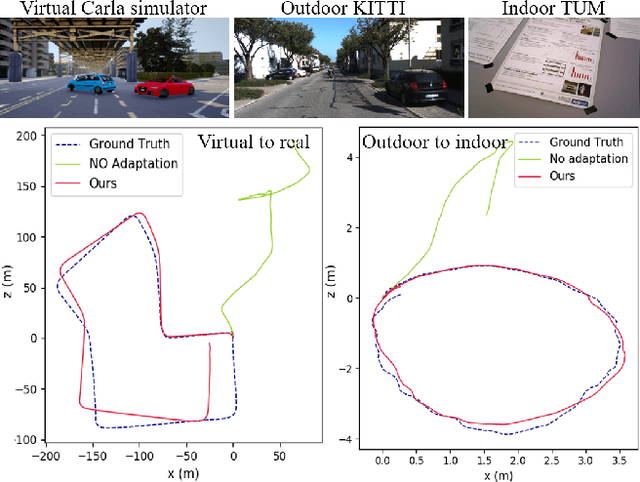
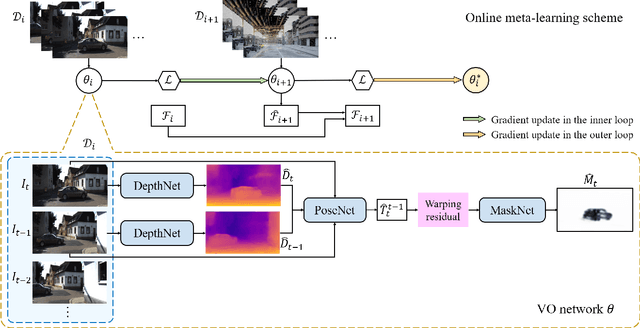

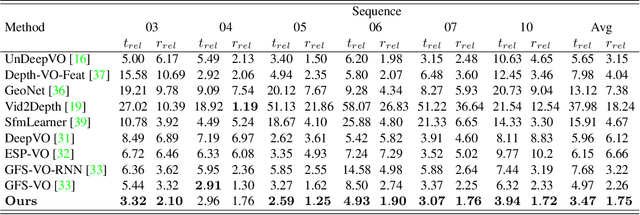
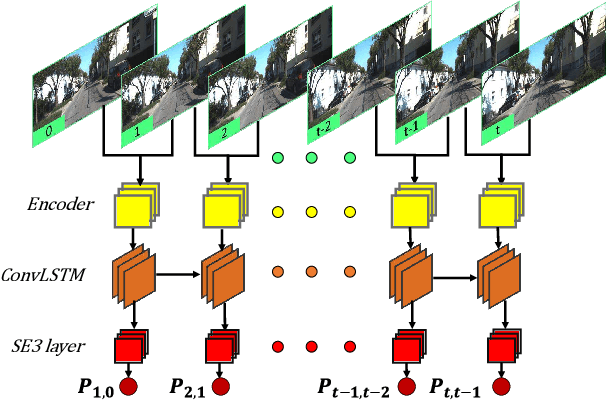
Self-supervised VO methods have shown great success in jointly estimating camera pose and depth from videos. However, like most data-driven methods, existing VO networks suffer from a notable decrease in performance when confronted with scenes different from the training data, which makes them unsuitable for practical applications. In this paper, we propose an online meta-learning algorithm to enable VO networks to continuously adapt to new environments in a self-supervised manner. The proposed method utilizes convolutional long short-term memory (convLSTM) to aggregate rich spatial-temporal information in the past. The network is able to memorize and learn from its past experience for better estimation and fast adaptation to the current frame. When running VO in the open world, in order to deal with the changing environment, we propose an online feature alignment method by aligning feature distributions at different time. Our VO network is able to seamlessly adapt to different environments. Extensive experiments on unseen outdoor scenes, virtual to real world and outdoor to indoor environments demonstrate that our method consistently outperforms state-of-the-art self-supervised VO baselines considerably.
Sequential Adversarial Learning for Self-Supervised Deep Visual Odometry
Aug 23, 2019



We propose a self-supervised learning framework for visual odometry (VO) that incorporates correlation of consecutive frames and takes advantage of adversarial learning. Previous methods tackle self-supervised VO as a local structure from motion (SfM) problem that recovers depth from single image and relative poses from image pairs by minimizing photometric loss between warped and captured images. As single-view depth estimation is an ill-posed problem, and photometric loss is incapable of discriminating distortion artifacts of warped images, the estimated depth is vague and pose is inaccurate. In contrast to previous methods, our framework learns a compact representation of frame-to-frame correlation, which is updated by incorporating sequential information. The updated representation is used for depth estimation. Besides, we tackle VO as a self-supervised image generation task and take advantage of Generative Adversarial Networks (GAN). The generator learns to estimate depth and pose to generate a warped target image. The discriminator evaluates the quality of generated image with high-level structural perception that overcomes the problem of pixel-wise loss in previous methods. Experiments on KITTI and Cityscapes datasets show that our method obtains more accurate depth with details preserved and predicted pose outperforms state-of-the-art self-supervised methods significantly.
Beyond Tracking: Selecting Memory and Refining Poses for Deep Visual Odometry
Apr 05, 2019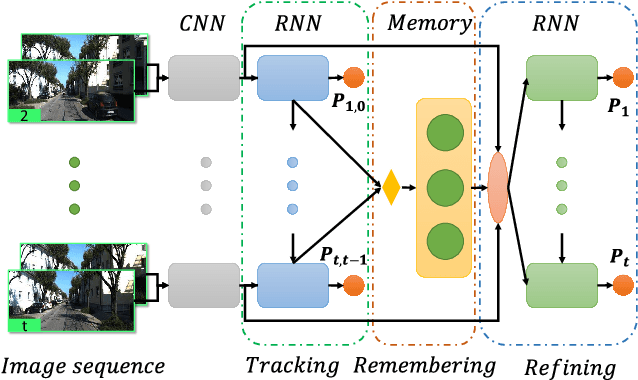

Most previous learning-based visual odometry (VO) methods take VO as a pure tracking problem. In contrast, we present a VO framework by incorporating two additional components called Memory and Refining. The Memory component preserves global information by employing an adaptive and efficient selection strategy. The Refining component ameliorates previous results with the contexts stored in the Memory by adopting a spatial-temporal attention mechanism for feature distilling. Experiments on the KITTI and TUM-RGBD benchmark datasets demonstrate that our method outperforms state-of-the-art learning-based methods by a large margin and produces competitive results against classic monocular VO approaches. Especially, our model achieves outstanding performance in challenging scenarios such as texture-less regions and abrupt motions, where classic VO algorithms tend to fail.