 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Generalizable Robotic Manipulation in Dynamic Environments
Mar 16, 2026Vision-Language-Action (VLA) models excel in static manipulation but struggle in dynamic environments with moving targets. This performance gap primarily stems from a scarcity of dynamic manipulation datasets and the reliance of mainstream VLAs on single-frame observations, restricting their spatiotemporal reasoning capabilities. To address this, we introduce DOMINO, a large-scale dataset and benchmark for generalizable dynamic manipulation, featuring 35 tasks with hierarchical complexities, over 110K expert trajectories, and a multi-dimensional evaluation suite. Through comprehensive experiments, we systematically evaluate existing VLAs on dynamic tasks, explore effective training strategies for dynamic awareness, and validate the generalizability of dynamic data. Furthermore, we propose PUMA, a dynamics-aware VLA architecture. By integrating scene-centric historical optical flow and specialized world queries to implicitly forecast object-centric future states, PUMA couples history-aware perception with short-horizon prediction. Results demonstrate that PUMA achieves state-of-the-art performance, yielding a 6.3% absolute improvement in success rate over baselines. Moreover, we show that training on dynamic data fosters robust spatiotemporal representations that transfer to static tasks. All code and data are available at https://github.com/H-EmbodVis/DOMINO.
Learning Thermal-Aware Locomotion Policies for an Electrically-Actuated Quadruped Robot
Mar 02, 2026Electrically-actuated quadrupedal robots possess high mobility on complex terrains, but their motors tend to accumulate heat under high-torque cyclic loads, potentially triggering overheat protection and limiting long-duration tasks. This work proposes a thermal-aware control method that incorporates motor temperatures into reinforcement learning locomotion policies and introduces thermal-constraint rewards to prevent temperature exceedance. Real-world experiments on the Unitree A1 demonstrate that, under a fixed 3 kg payload, the baseline policy triggers overheat protection and stops within approximately 7 minutes, whereas the proposed method can operate continuously for over 27 minutes without thermal interruptions while maintaining comparable command-tracking performance, thereby enhancing sustainable operational capability.
Sensing-Assisted Channel Estimation for OFDM ISAC Systems: Framework, Algorithm, and Analysis
Feb 23, 2025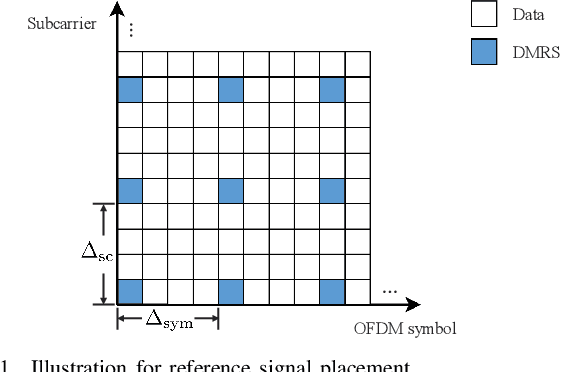



Integrated sensing and communication (ISAC) has garnered significant attention in recent years. In this paper, we delve into the topic of sensing-assisted communication within ISAC systems. More specifically, a novel sensing-assisted channel estimation scheme is proposed for bistatic orthogonal-frequency-division-multiplexing (OFDM) ISAC systems. A framework of sensing-assisted channel estimator is first developed, integrating a tailored low-complexity sensing algorithm to facilitate real-time channel estimation and decoding. To address the potential sensing errors caused by low-complexity sensing algorithms, a sensing-assisted linear minimum mean square error (LMMSE) estimation algorithm is then developed. This algorithm incorporates tolerance factors designed to account for deviations between estimated and true channel parameters, enabling the construction of robust correlation matrices for LMMSE estimation. Additionally, we establish a systematic mechanism for determining these tolerance factors. A comprehensive analysis of the normalized mean square error (NMSE) performance and computational complexity is finally conducted, providing valuable insights into the selection of the estimator's parameters. The effectiveness of our proposed scheme is validated by extensive simulations. Compared to existing methods, our proposed scheme demonstrates superior performance, particularly in high signal-to-noise ratio (SNR) regions or with large bandwidths, while maintaining low computational complexity.
Safety-Aware Human-Lead Vehicle Platooning by Proactively Reacting to Uncertain Human Behaving
May 13, 2024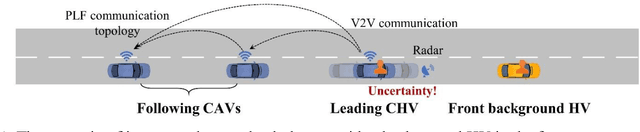
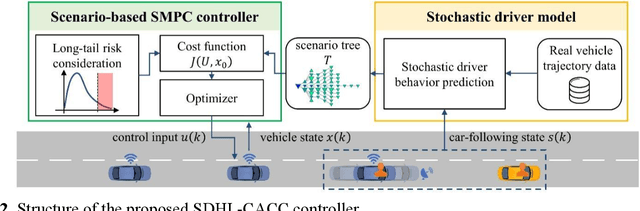
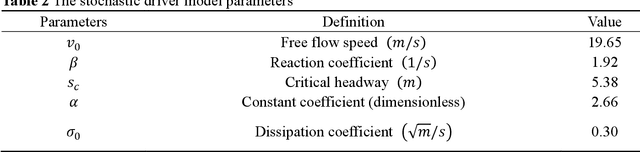
Human-Lead Cooperative Adaptive Cruise Control (HL-CACC) is regarded as a promising vehicle platooning technology in real-world implementation. By utilizing a Human-driven Vehicle (HV) as the platoon leader, HL-CACC reduces the cost and enhances the reliability of perception and decision-making. However, state-of-the-art HL-CACC technology still has a great limitation on driving safety for the lack of considering the leading human driver's uncertain behaving. In this study, a HL-CACC controller is designed based on Stochastic Model Predictive Control (SMPC). It is enabled to predict the driving intention of the leading Connected Human-Driven Vehicle (CHV). The proposed controller has the following features: i) enhanced perceived safety in oscillating traffic; ii) guaranteed safety against hard brakes; iii) computational efficient for real-time implementation. The proposed controller is evaluated on a PreScan&Simulink simulation platform. Real vehicle trajectory data is collected for the calibration of simulation. Results reveal that the proposed controller: i) improves perceived safety by 19.17% in oscillating traffic; ii) enhances actual safety by 7.76% against hard brake; iii) is confirmed with string stability. The computation time is approximately 3 milliseconds when running on a laptop equipped with an Intel i5-13500H CPU. This indicates the proposed controller is ready for real-time implementation.
Adaptive Learning Material Recommendation in Online Language Education
May 26, 2019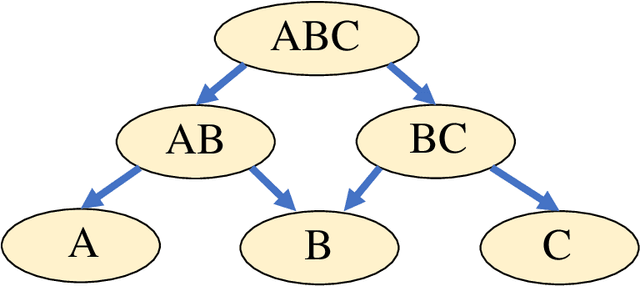
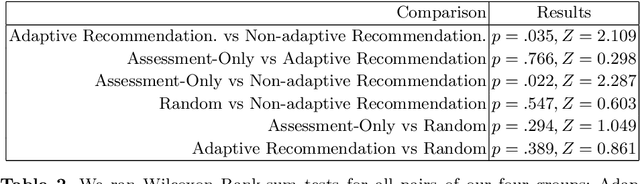
Recommending personalized learning materials for online language learning is challenging because we typically lack data about the student's ability and the relative difficulty of learning materials. This makes it hard to recommend appropriate content that matches the student's prior knowledge. In this paper, we propose a refined hierarchical knowledge structure to model vocabulary knowledge, which enables us to automatically organize the authentic and up-to-date learning materials collected from the internet. Based on this knowledge structure, we then introduce a hybrid approach to recommend learning materials that adapts to a student's language level. We evaluate our work with an online Japanese learning tool and the results suggest adding adaptivity into material recommendation significantly increases student engagement.
* The short version of this paper is published at AIED 2019
Grammatical Templates: Improving Text Difficulty Evaluation for Language Learners
Feb 15, 2017
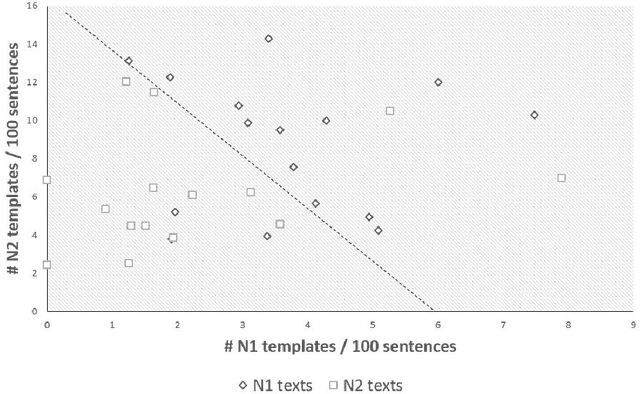

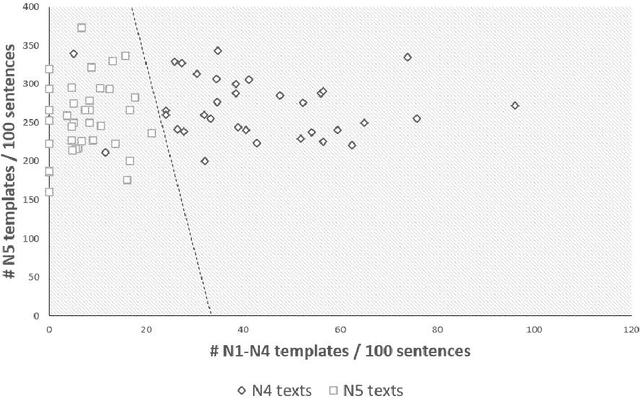
Language students are most engaged while reading texts at an appropriate difficulty level. However, existing methods of evaluating text difficulty focus mainly on vocabulary and do not prioritize grammatical features, hence they do not work well for language learners with limited knowledge of grammar. In this paper, we introduce grammatical templates, the expert-identified units of grammar that students learn from class, as an important feature of text difficulty evaluation. Experimental classification results show that grammatical template features significantly improve text difficulty prediction accuracy over baseline readability features by 7.4%. Moreover, we build a simple and human-understandable text difficulty evaluation approach with 87.7% accuracy, using only 5 grammatical template features.