 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-Aware Human-Lead Vehicle Platooning by Proactively Reacting to Uncertain Human Behaving
Paper and Code
May 13, 2024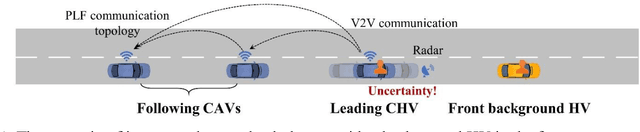
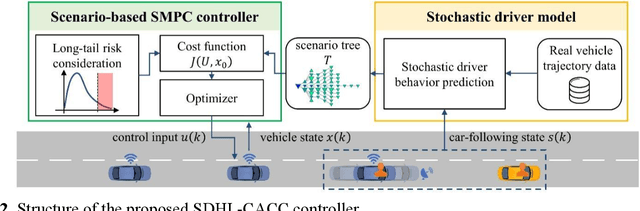
Human-Lead Cooperative Adaptive Cruise Control (HL-CACC) is regarded as a promising vehicle platooning technology in real-world implementation. By utilizing a Human-driven Vehicle (HV) as the platoon leader, HL-CACC reduces the cost and enhances the reliability of perception and decision-making. However, state-of-the-art HL-CACC technology still has a great limitation on driving safety for the lack of considering the leading human driver's uncertain behaving. In this study, a HL-CACC controller is designed based on Stochastic Model Predictive Control (SMPC). It is enabled to predict the driving intention of the leading Connected Human-Driven Vehicle (CHV). The proposed controller has the following features: i) enhanced perceived safety in oscillating traffic; ii) guaranteed safety against hard brakes; iii) computational efficient for real-time implementation. The proposed controller is evaluated on a PreScan&Simulink simulation platform. Real vehicle trajectory data is collected for the calibration of simulation. Results reveal that the proposed controller: i) improves perceived safety by 19.17% in oscillating traffic; ii) enhances actual safety by 7.76% against hard brake; iii) is confirmed with string stability. The computation time is approximately 3 milliseconds when running on a laptop equipped with an Intel i5-13500H CPU. This indicates the proposed controller is ready for real-time implementation.