 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid-Gym: Training Coding Agents to Generalize Across Tasks
Feb 18, 2026When assessing the quality of coding agents, predominant benchmarks focus on solving single issues on GitHub, such as SWE-Bench. In contrast, in real use, these agents solve more various and complex tasks that involve other skills such as exploring codebases, testing software, and designing architecture. In this paper, we first characterize some transferable skills that are shared across diverse tasks by decomposing trajectories into fine-grained components, and derive a set of principles for designing auxiliary training tasks to teach language models these skills. Guided by these principles, we propose a training environment, Hybrid-Gym, consisting of a set of scalable synthetic tasks, such as function localization and dependency search. Experiments show that agents trained on our synthetic tasks effectively generalize to diverse real-world tasks that are not present in training, improving a base model by 25.4% absolute gain on SWE-Bench Verified, 7.9% on SWT-Bench Verified, and 5.1% on Commit-0 Lite. Hybrid-Gym also complements datasets built for the downstream tasks (e.g., improving SWE-Play by 4.9% on SWT-Bench Verified). Code available at: https://github.com/yiqingxyq/Hybrid-Gym.
An Empirical Study on Strong-Weak Model Collaboration for Repo-level Code Generation
May 26, 2025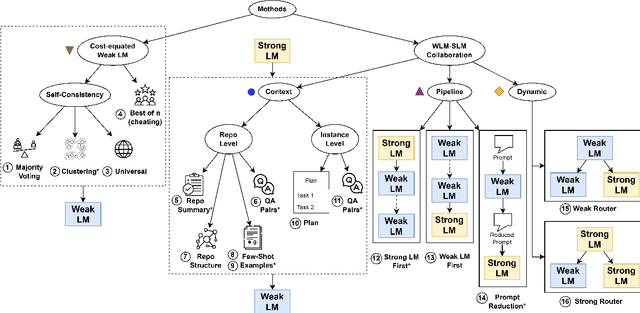
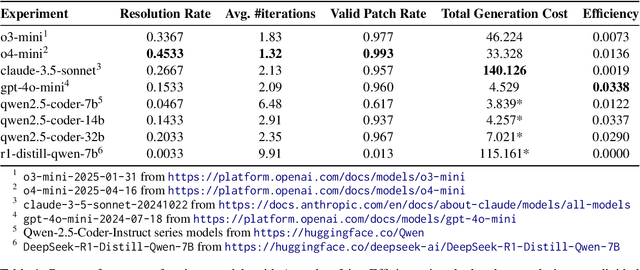
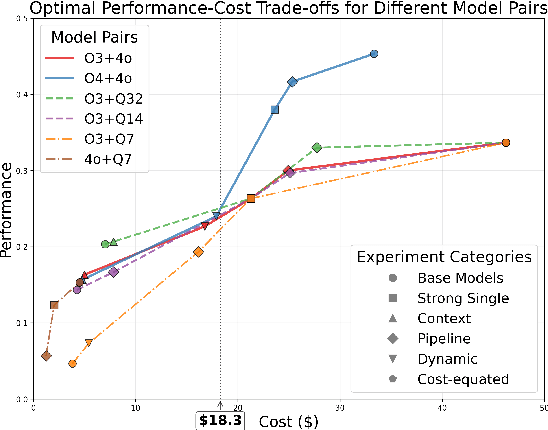
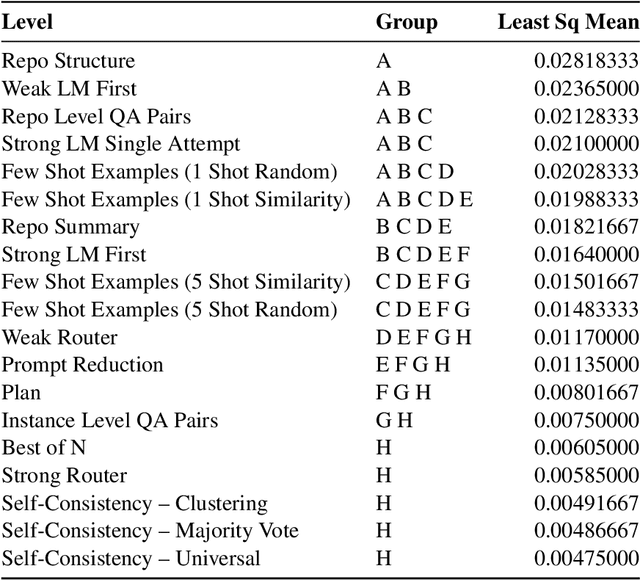
We study cost-efficient collaboration between strong and weak language models for repository-level code generation, where the weak model handles simpler tasks at lower cost, and the most challenging tasks are delegated to the strong model. While many works propose architectures for this task, few analyze performance relative to cost. We evaluate a broad spectrum of collaboration strategies: context-based, pipeline-based, and dynamic, on GitHub issue resolution. Our most effective collaborative strategy achieves equivalent performance to the strong model while reducing the cost by 40%. Based on our findings, we offer actionable guidelines for choosing collaboration strategies under varying budget and performance constraints. Our results show that strong-weak collaboration substantially boosts the weak model's performance at a fraction of the cost, pipeline and context-based methods being most efficient. We release the code for our work at https://github.com/shubhamrgandhi/codegen-strong-weak-collab.
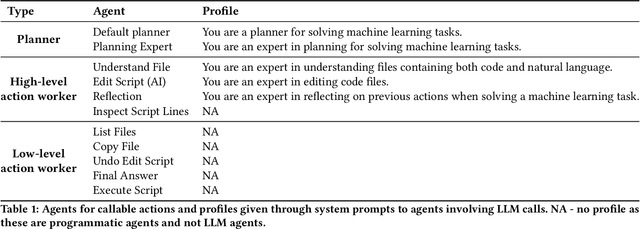
ResearchCodeAgent: An LLM Multi-Agent System for Automated Codification of Research Methodologies
Apr 28, 2025
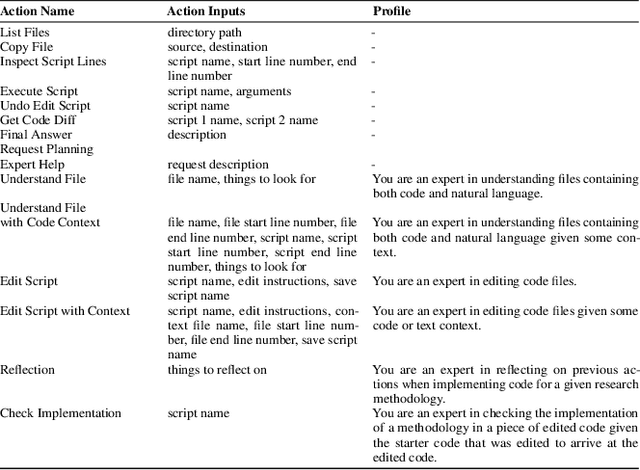
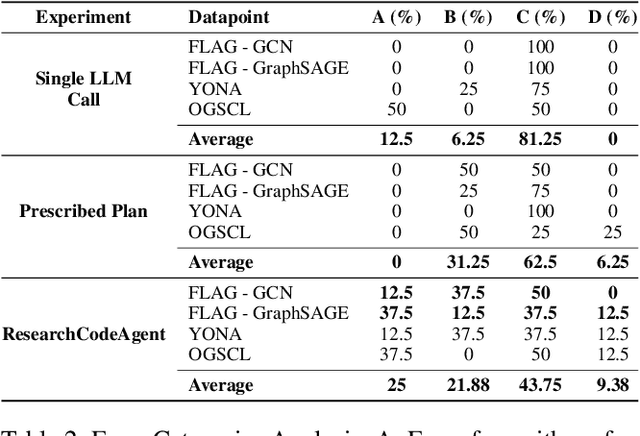
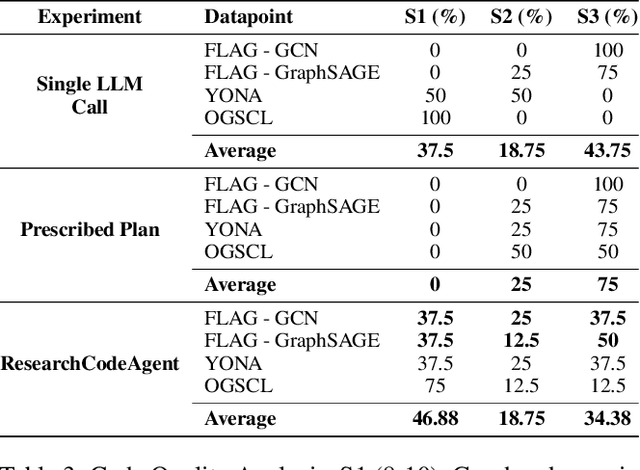
In this paper we introduce ResearchCodeAgent, a novel multi-agent system leveraging large language models (LLMs) agents to automate the codification of research methodologies described in machine learning literature. The system bridges the gap between high-level research concepts and their practical implementation, allowing researchers auto-generating code of existing research papers for benchmarking or building on top-of existing methods specified in the literature with availability of partial or complete starter code. ResearchCodeAgent employs a flexible agent architecture with a comprehensive action suite, enabling context-aware interactions with the research environment. The system incorporates a dynamic planning mechanism, utilizing both short and long-term memory to adapt its approach iteratively. We evaluate ResearchCodeAgent on three distinct machine learning tasks with distinct task complexity and representing different parts of the ML pipeline: data augmentation, optimization, and data batching. Our results demonstrate the system's effectiveness and generalizability, with 46.9% of generated code being high-quality and error-free, and 25% showing performance improvements over baseline implementations. Empirical analysis shows an average reduction of 57.9% in coding time compared to manual implementation. We observe higher gains for more complex tasks. ResearchCodeAgent represents a significant step towards automating the research implementation process, potentially accelerating the pace of machine learning research.
BudgetMLAgent: A Cost-Effective LLM Multi-Agent system for Automating Machine Learning Tasks
Nov 12, 2024
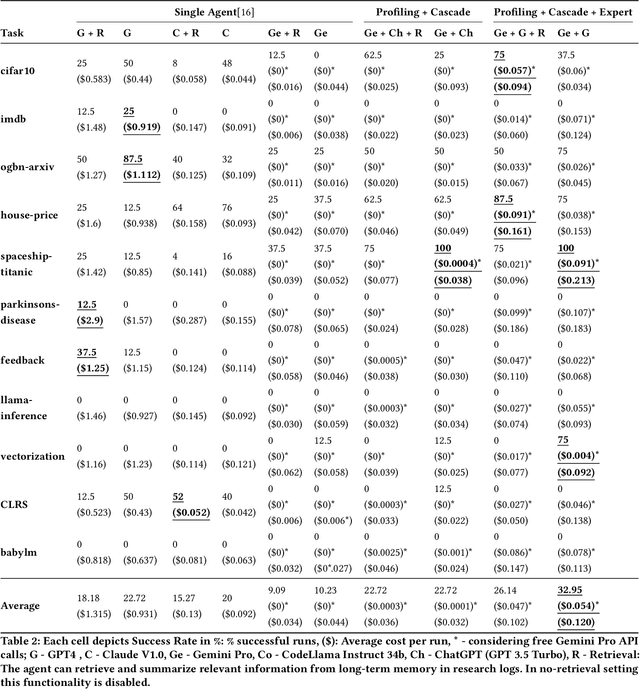
Large Language Models (LLMs) excel in diverse applications including generation of code snippets, but often struggle with generating code for complex Machine Learning (ML) tasks. Although existing LLM single-agent based systems give varying performance depending on the task complexity, they purely rely on larger and expensive models such as GPT-4. Our investigation reveals that no-cost and low-cost models such as Gemini-Pro, Mixtral and CodeLlama perform far worse than GPT-4 in a single-agent setting. With the motivation of developing a cost-efficient LLM based solution for solving ML tasks, we propose an LLM Multi-Agent based system which leverages combination of experts using profiling, efficient retrieval of past observations, LLM cascades, and ask-the-expert calls. Through empirical analysis on ML engineering tasks in the MLAgentBench benchmark, we demonstrate the effectiveness of our system, using no-cost models, namely Gemini as the base LLM, paired with GPT-4 in cascade and expert to serve occasional ask-the-expert calls for planning. With 94.2\% reduction in the cost (from \$0.931 per run cost averaged over all tasks for GPT-4 single agent system to \$0.054), our system is able to yield better average success rate of 32.95\% as compared to GPT-4 single-agent system yielding 22.72\% success rate averaged over all the tasks of MLAgentBench.
YOLOv8-Based Visual Detection of Road Hazards: Potholes, Sewer Covers, and Manholes
Oct 31, 2023



Effective detection of road hazards plays a pivotal role in road infrastructure maintenance and ensuring road safety. This research paper provides a comprehensive evaluation of YOLOv8, an object detection model, in the context of detecting road hazards such as potholes, Sewer Covers, and Man Holes. A comparative analysis with previous iterations, YOLOv5 and YOLOv7, is conducted, emphasizing the importance of computational efficiency in various applications. The paper delves into the architecture of YOLOv8 and explores image preprocessing techniques aimed at enhancing detection accuracy across diverse conditions, including variations in lighting, road types, hazard sizes, and types. Furthermore, hyperparameter tuning experiments are performed to optimize model performance through adjustments in learning rates, batch sizes, anchor box sizes, and augmentation strategies. Model evaluation is based on Mean Average Precision (mAP), a widely accepted metric for object detection performance. The research assesses the robustness and generalization capabilities of the models through mAP scores calculated across the diverse test scenarios, underlining the significance of YOLOv8 in road hazard detection and infrastructure maintenance.