 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMVPGS: Excavating Multi-view Priors for Gaussian Splatting from Sparse Input Views
Sep 22, 2024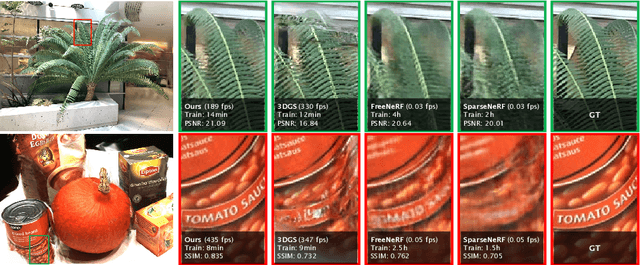
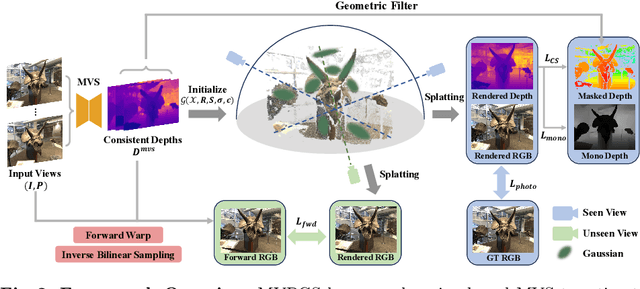
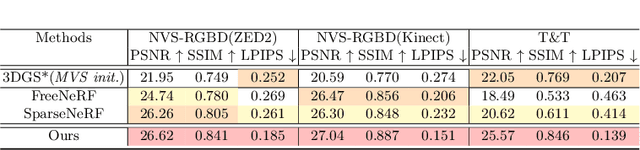
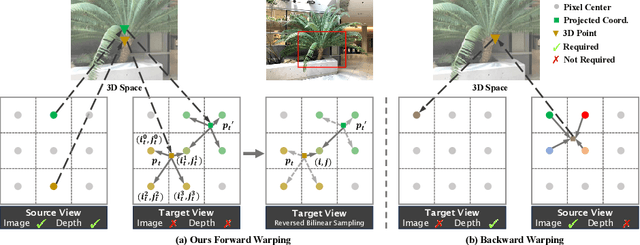
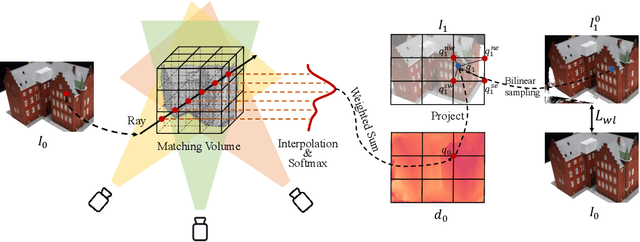
Recently, the Neural Radiance Field (NeRF) advancement has facilitated few-shot Novel View Synthesis (NVS), which is a significant challenge in 3D vision applications. Despite numerous attempts to reduce the dense input requirement in NeRF, it still suffers from time-consumed training and rendering processes. More recently, 3D Gaussian Splatting (3DGS) achieves real-time high-quality rendering with an explicit point-based representation. However, similar to NeRF, it tends to overfit the train views for lack of constraints. In this paper, we propose \textbf{MVPGS}, a few-shot NVS method that excavates the multi-view priors based on 3D Gaussian Splatting. We leverage the recent learning-based Multi-view Stereo (MVS) to enhance the quality of geometric initialization for 3DGS. To mitigate overfitting, we propose a forward-warping method for additional appearance constraints conforming to scenes based on the computed geometry. Furthermore, we introduce a view-consistent geometry constraint for Gaussian parameters to facilitate proper optimization convergence and utilize a monocular depth regularization as compensation. Experiments show that the proposed method achieves state-of-the-art performance with real-time rendering speed. Project page: https://zezeaaa.github.io/projects/MVPGS/
Surface-Centric Modeling for High-Fidelity Generalizable Neural Surface Reconstruction
Sep 05, 2024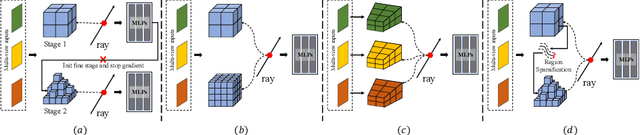
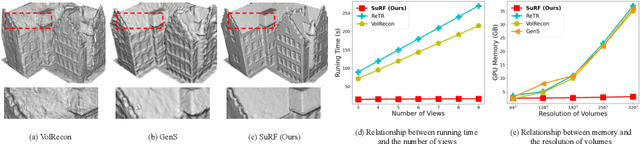
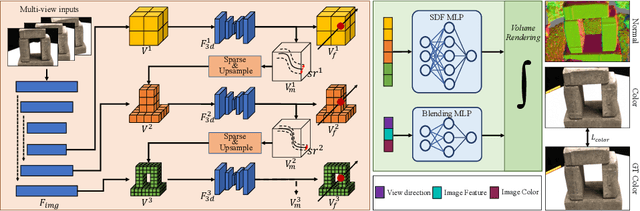
Reconstructing the high-fidelity surface from multi-view images, especially sparse images, is a critical and practical task that has attracted widespread attention in recent years. However, existing methods are impeded by the memory constraint or the requirement of ground-truth depths and cannot recover satisfactory geometric details. To this end, we propose SuRF, a new Surface-centric framework that incorporates a new Region sparsification based on a matching Field, achieving good trade-offs between performance, efficiency and scalability. To our knowledge, this is the first unsupervised method achieving end-to-end sparsification powered by the introduced matching field, which leverages the weight distribution to efficiently locate the boundary regions containing surface. Instead of predicting an SDF value for each voxel, we present a new region sparsification approach to sparse the volume by judging whether the voxel is inside the surface region. In this way, our model can exploit higher frequency features around the surface with less memory and computational consumption. Extensive experiments on multiple benchmarks containing complex large-scale scenes show that our reconstructions exhibit high-quality details and achieve new state-of-the-art performance, i.e., 46% improvements with 80% less memory consumption. Code is available at https://github.com/prstrive/SuRF.
GenS: Generalizable Neural Surface Reconstruction from Multi-View Images
Jun 04, 2024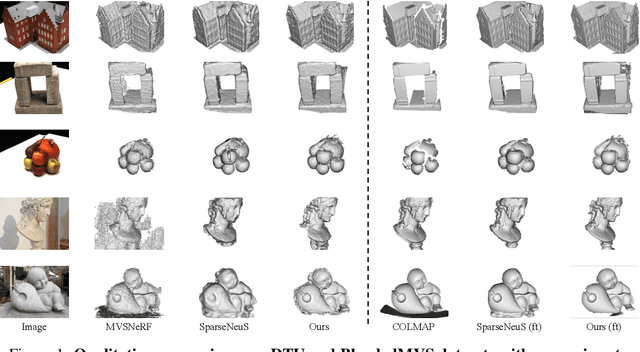
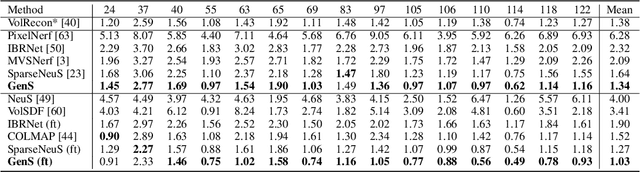
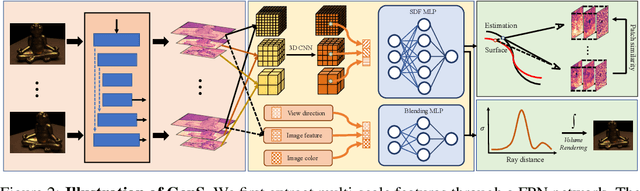
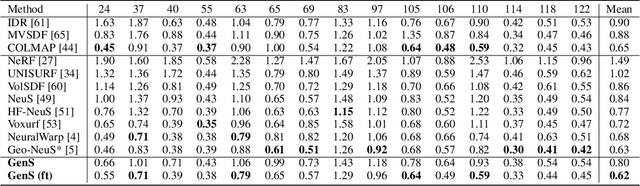
Combining the signed distance function (SDF) and differentiable volume rendering has emerged as a powerful paradigm for surface reconstruction from multi-view images without 3D supervision. However, current methods are impeded by requiring long-time per-scene optimizations and cannot generalize to new scenes. In this paper, we present GenS, an end-to-end generalizable neural surface reconstruction model. Unlike coordinate-based methods that train a separate network for each scene, we construct a generalized multi-scale volume to directly encode all scenes. Compared with existing solutions, our representation is more powerful, which can recover high-frequency details while maintaining global smoothness. Meanwhile, we introduce a multi-scale feature-metric consistency to impose the multi-view consistency in a more discriminative multi-scale feature space, which is robust to the failures of the photometric consistency. And the learnable feature can be self-enhanced to continuously improve the matching accuracy and mitigate aggregation ambiguity. Furthermore, we design a view contrast loss to force the model to be robust to those regions covered by few viewpoints through distilling the geometric prior from dense input to sparse input. Extensive experiments on popular benchmarks show that our model can generalize well to new scenes and outperform existing state-of-the-art methods even those employing ground-truth depth supervision. Code is available at https://github.com/prstrive/GenS.