 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFailure Modes of Time Series Interpretability Algorithms for Critical Care Applications and Potential Solutions
Jun 23, 2025Interpretability plays a vital role in aligning and deploying deep learning models in critical care, especially in constantly evolving conditions that influence patient survival. However, common interpretability algorithms face unique challenges when applied to dynamic prediction tasks, where patient trajectories evolve over time. Gradient, Occlusion, and Permutation-based methods often struggle with time-varying target dependency and temporal smoothness. This work systematically analyzes these failure modes and supports learnable mask-based interpretability frameworks as alternatives, which can incorporate temporal continuity and label consistency constraints to learn feature importance over time. Here, we propose that learnable mask-based approaches for dynamic timeseries prediction problems provide more reliable and consistent interpretations for applications in critical care and similar domains.
PHEONA: An Evaluation Framework for Large Language Model-based Approaches to Computational Phenotyping
Mar 25, 2025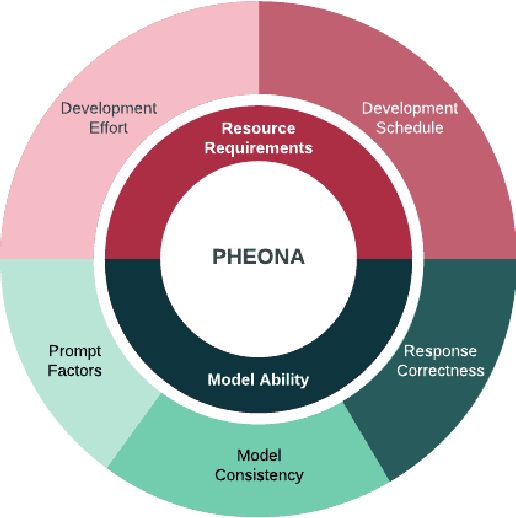
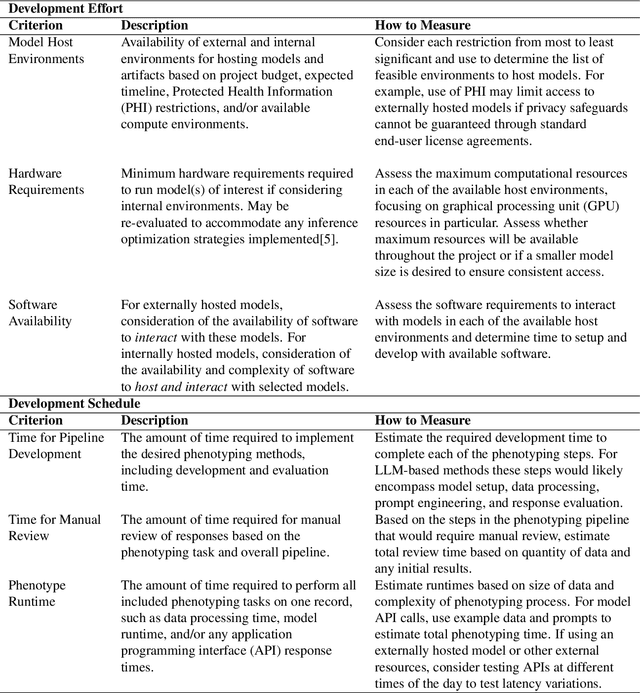
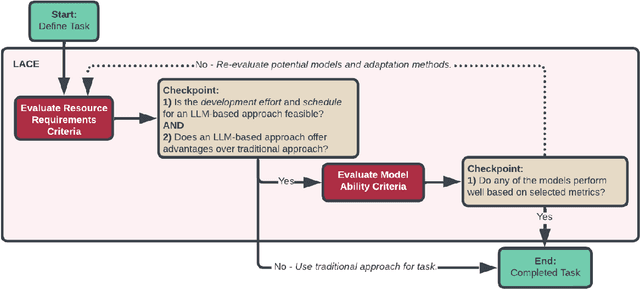
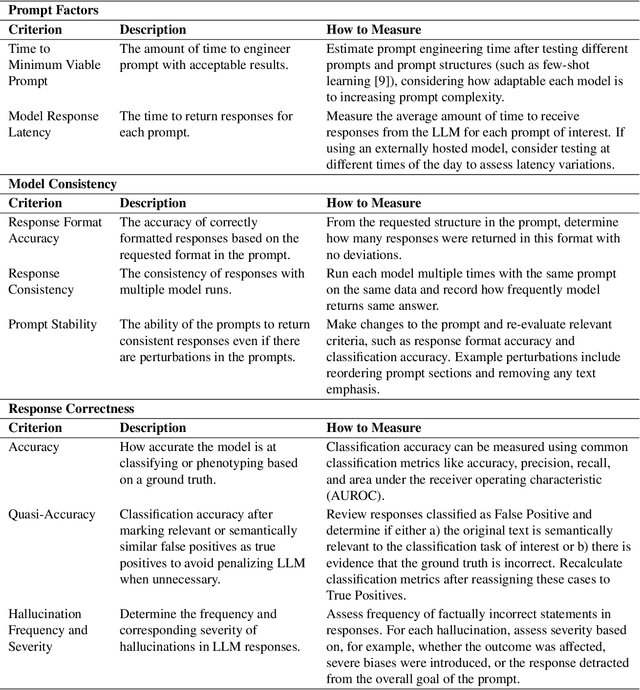
Computational phenotyping is essential for biomedical research but often requires significant time and resources, especially since traditional methods typically involve extensive manual data review. While machine learning and natural language processing advancements have helped, further improvements are needed. Few studies have explored using Large Language Models (LLMs) for these tasks despite known advantages of LLMs for text-based tasks. To facilitate further research in this area, we developed an evaluation framework, Evaluation of PHEnotyping for Observational Health Data (PHEONA), that outlines context-specific considerations. We applied and demonstrated PHEONA on concept classification, a specific task within a broader phenotyping process for Acute Respiratory Failure (ARF) respiratory support therapies. From the sample concepts tested, we achieved high classification accuracy, suggesting the potential for LLM-based methods to improve computational phenotyping processes.
Gamified crowd-sourcing of high-quality data for visual fine-tuning
Oct 08, 2024



This paper introduces Gamified Adversarial Prompting (GAP), a framework that crowd-sources high-quality data for visual instruction tuning of large multimodal models. GAP transforms the data collection process into an engaging game, incentivizing players to provide fine-grained, challenging questions and answers that target gaps in the model's knowledge. Our contributions include (1) an approach to capture question-answer pairs from humans that directly address weaknesses in a model's knowledge, (2) a method for evaluating and rewarding players that successfully incentivizes them to provide high-quality submissions, and (3) a scalable, gamified platform that succeeds in collecting this data from over 50,000 participants in just a few weeks. Our implementation of GAP has significantly improved the accuracy of a small multimodal model, namely MiniCPM-Llama3-V-2.5-8B, increasing its GPT score from 0.147 to 0.477 on our dataset, approaching the benchmark set by the much larger GPT-4V. Moreover, we demonstrate that the data generated using MiniCPM-Llama3-V-2.5-8B also enhances its performance across other benchmarks, and exhibits cross-model benefits. Specifically, the same data improves the performance of QWEN2-VL-2B and QWEN2-VL-7B on the same multiple benchmarks.
Machines and Influence
Dec 07, 2021Policymakers face a broader challenge of how to view AI capabilities today and where does society stand in terms of those capabilities. This paper surveys AI capabilities and tackles this very issue, exploring it in context of political security in digital societies. We introduce a Matrix of Machine Influence to frame and navigate the adversarial applications of AI, and further extend the ideas of Information Management to better understand contemporary AI systems deployment as part of a complex information system. Providing a comprehensive review of man-machine interactions in our networked society and political systems, we suggest that better regulation and management of information systems can more optimally offset the risks of AI and utilise the emerging capabilities which these systems have to offer to policymakers and political institutions across the world. Hopefully this long essay will actuate further debates and discussions over these ideas, and prove to be a useful contribution towards governing the future of AI.
Structuring an unordered text document
Jan 29, 2019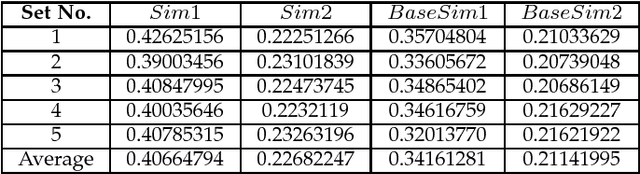
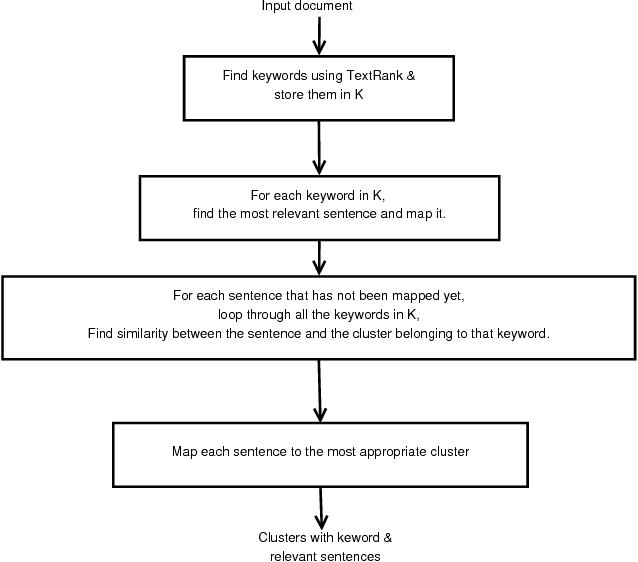
Segmenting an unordered text document into different sections is a very useful task in many text processing applications like multiple document summarization, question answering, etc. This paper proposes structuring of an unordered text document based on the keywords in the document. We test our approach on Wikipedia documents using both statistical and predictive methods such as the TextRank algorithm and Google's USE (Universal Sentence Encoder). From our experimental results, we show that the proposed model can effectively structure an unordered document into sections.
A Joint 3D-2D based Method for Free Space Detection on Roads
Jan 15, 2018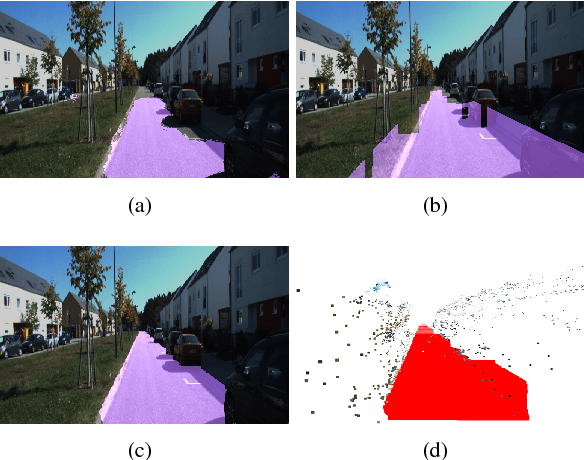
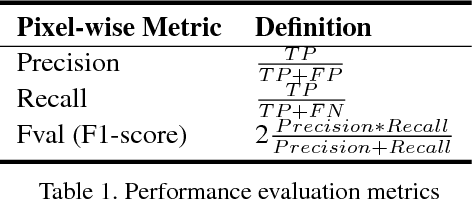
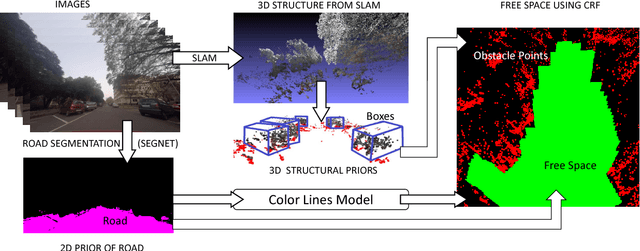
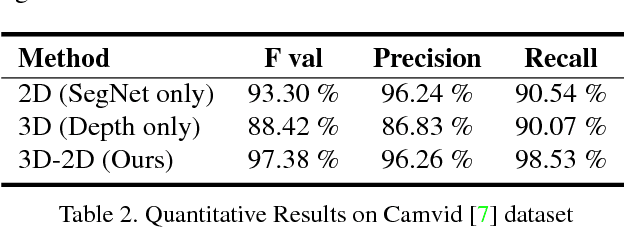
In this paper, we address the problem of road segmentation and free space detection in the context of autonomous driving. Traditional methods either use 3-dimensional (3D) cues such as point clouds obtained from LIDAR, RADAR or stereo cameras or 2-dimensional (2D) cues such as lane markings, road boundaries and object detection. Typical 3D point clouds do not have enough resolution to detect fine differences in heights such as between road and pavement. Image based 2D cues fail when encountering uneven road textures such as due to shadows, potholes, lane markings or road restoration. We propose a novel free road space detection technique combining both 2D and 3D cues. In particular, we use CNN based road segmentation from 2D images and plane/box fitting on sparse depth data obtained from SLAM as priors to formulate an energy minimization using conditional random field (CRF), for road pixels classification. While the CNN learns the road texture and is unaffected by depth boundaries, the 3D information helps in overcoming texture based classification failures. Finally, we use the obtained road segmentation with the 3D depth data from monocular SLAM to detect the free space for the navigation purposes. Our experiments on KITTI odometry dataset, Camvid dataset, as well as videos captured by us, validate the superiority of the proposed approach over the state of the art.