 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeELDA: Using Edges to Have an Edge on Semantic Segmentation Based UDA
Nov 16, 2022



Many unsupervised domain adaptation (UDA) methods have been proposed to bridge the domain gap by utilizing domain invariant information. Most approaches have chosen depth as such information and achieved remarkable success. Despite their effectiveness, using depth as domain invariant information in UDA tasks may lead to multiple issues, such as excessively high extraction costs and difficulties in achieving a reliable prediction quality. As a result, we introduce Edge Learning based Domain Adaptation (ELDA), a framework which incorporates edge information into its training process to serve as a type of domain invariant information. In our experiments, we quantitatively and qualitatively demonstrate that the incorporation of edge information is indeed beneficial and effective and enables ELDA to outperform the contemporary state-of-the-art methods on two commonly adopted benchmarks for semantic segmentation based UDA tasks. In addition, we show that ELDA is able to better separate the feature distributions of different classes. We further provide an ablation analysis to justify our design decisions.
Investigation of Factorized Optical Flows as Mid-Level Representations
Mar 10, 2022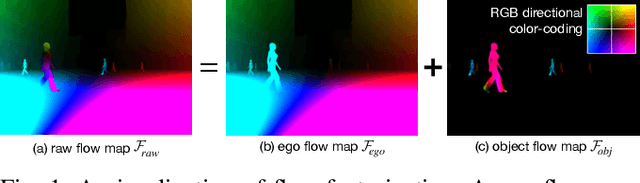
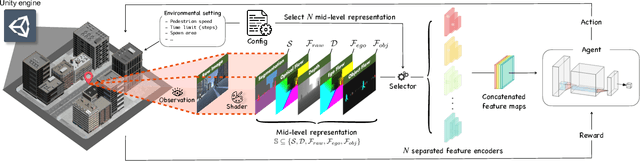
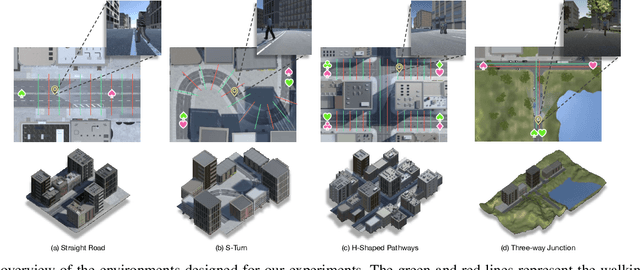
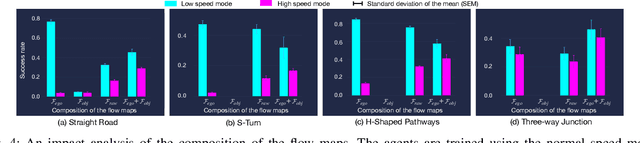
In this paper, we introduce a new concept of incorporating factorized flow maps as mid-level representations, for bridging the perception and the control modules in modular learning based robotic frameworks. To investigate the advantages of factorized flow maps and examine their interplay with the other types of mid-level representations, we further develop a configurable framework, along with four different environments that contain both static and dynamic objects, for analyzing the impacts of factorized optical flow maps on the performance of deep reinforcement learning agents. Based on this framework, we report our experimental results on various scenarios, and offer a set of analyses to justify our hypothesis. Finally, we validate flow factorization in real world scenarios.