 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferentiation Through Black-Box Quadratic Programming Solvers
Oct 10, 2024



In recent years, many deep learning approaches have incorporated layers that solve optimization problems (e.g., linear, quadratic, and semidefinite programs). Integrating these optimization problems as differentiable layers requires computing the derivatives of the optimization problem's solution with respect to its objective and constraints. This has so far prevented the use of state-of-the-art black-box numerical solvers within neural networks, as they lack a differentiable interface. To address this issue for one of the most common convex optimization problems -- quadratic programming (QP) -- we introduce dQP, a modular framework that enables plug-and-play differentiation for any QP solver, allowing seamless integration into neural networks and bi-level optimization tasks. Our solution is based on the core theoretical insight that knowledge of the active constraint set at the QP optimum allows for explicit differentiation. This insight reveals a unique relationship between the computation of the solution and its derivative, enabling efficient differentiation of any solver, that only requires the primal solution. Our implementation, which will be made publicly available, interfaces with an existing framework that supports over 15 state-of-the-art QP solvers, providing each with a fully differentiable backbone for immediate use as a differentiable layer in learning setups. To demonstrate the scalability and effectiveness of dQP, we evaluate it on a large benchmark dataset of QPs with varying structures. We compare dQP with existing differentiable QP methods, demonstrating its advantages across a range of problems, from challenging small and dense problems to large-scale sparse ones, including a novel bi-level geometry optimization problem.
Neural Network Approximation of Refinable Functions
Jul 28, 2021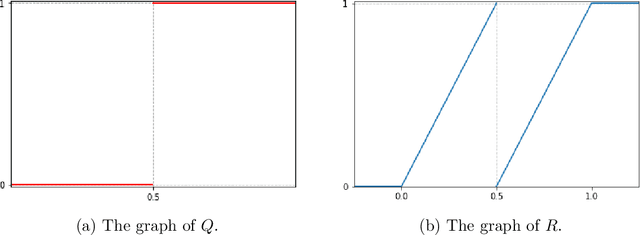
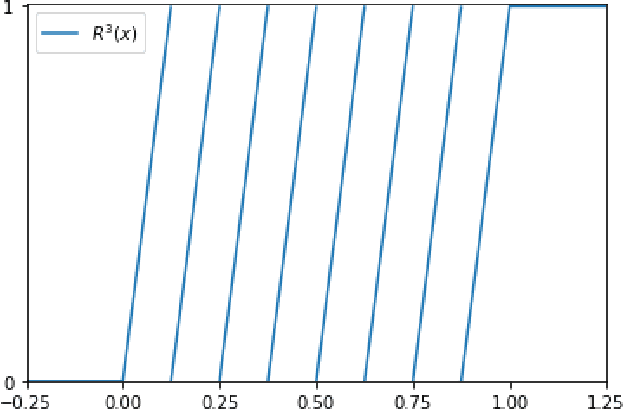
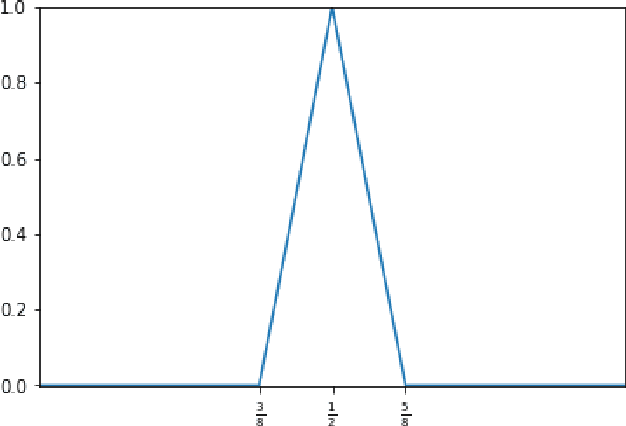
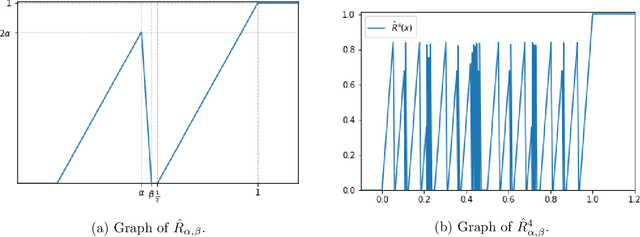
In the desire to quantify the success of neural networks in deep learning and other applications, there is a great interest in understanding which functions are efficiently approximated by the outputs of neural networks. By now, there exists a variety of results which show that a wide range of functions can be approximated with sometimes surprising accuracy by these outputs. For example, it is known that the set of functions that can be approximated with exponential accuracy (in terms of the number of parameters used) includes, on one hand, very smooth functions such as polynomials and analytic functions (see e.g. \cite{E,S,Y}) and, on the other hand, very rough functions such as the Weierstrass function (see e.g. \cite{EPGB,DDFHP}), which is nowhere differentiable. In this paper, we add to the latter class of rough functions by showing that it also includes refinable functions. Namely, we show that refinable functions are approximated by the outputs of deep ReLU networks with a fixed width and increasing depth with accuracy exponential in terms of their number of parameters. Our results apply to functions used in the standard construction of wavelets as well as to functions constructed via subdivision algorithms in Computer Aided Geometric Design.
Gaussian Process Landmarking on Manifolds
Jul 28, 2018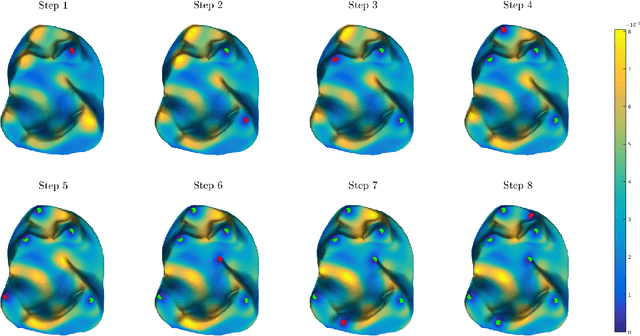
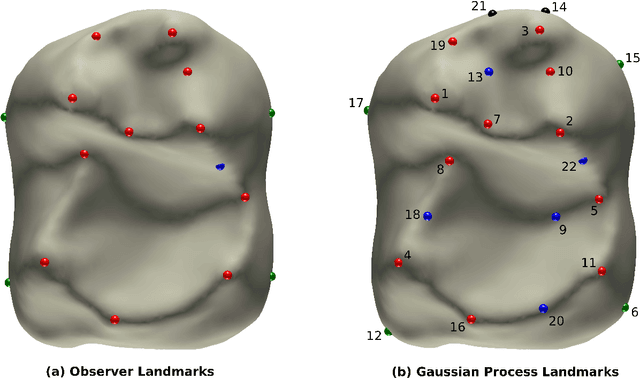
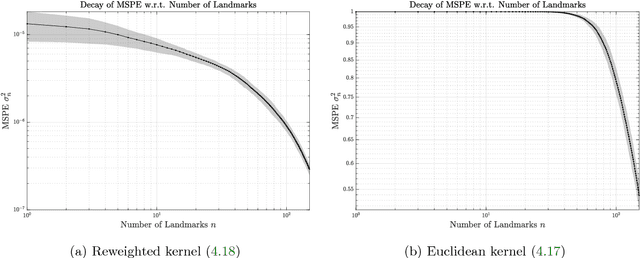
As a means of improving analysis of biological shapes, we propose an algorithm for sampling a Riemannian manifold by sequentially selecting points with maximum uncertainty under a Gaussian process model. This greedy strategy is known to be near-optimal in the experimental design literature, and appears to outperform the use of user-placed landmarks in representing the geometry of biological objects in our application. In the noiseless regime, we establish an upper bound for the mean squared prediction error (MSPE) in terms of the number of samples and geometric quantities of the manifold, demonstrating that the MSPE for our proposed sequential design decays at a rate comparable to the oracle rate achievable by any sequential or non-sequential optimal design; to our knowledge this is the first result of this type for sequential experimental design. The key is to link the greedy algorithm to reduced basis methods in the context of model reduction for partial differential equations. We expect this approach will find additional applications in other fields of research.
A Global Approach for Solving Edge-Matching Puzzles
Feb 10, 2015


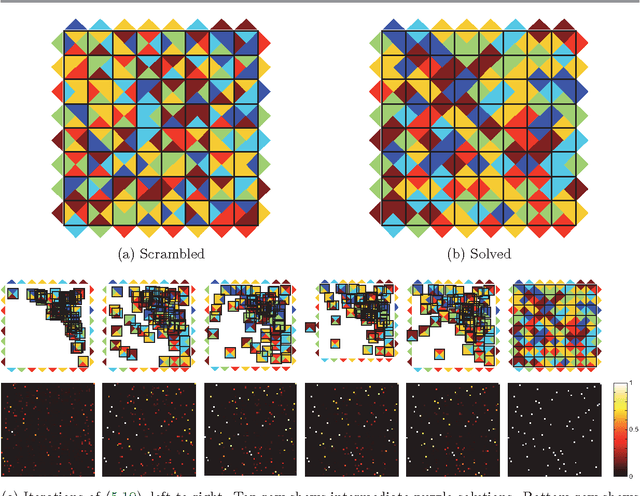
We consider apictorial edge-matching puzzles, in which the goal is to arrange a collection of puzzle pieces with colored edges so that the colors match along the edges of adjacent pieces. We devise an algebraic representation for this problem and provide conditions under which it exactly characterizes a puzzle. Using the new representation, we recast the combinatorial, discrete problem of solving puzzles as a global, polynomial system of equations with continuous variables. We further propose new algorithms for generating approximate solutions to the continuous problem by solving a sequence of convex relaxations.