 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Optimal Control Approach To Transformer Training
Mar 10, 2026In this paper, we develop a rigorous optimal control-theoretic approach to Transformer training that respects key structural constraints such as (i) realized-input-independence during execution, (ii) the ensemble control nature of the problem, and (iii) positional dependence. We model the Transformer architecture as a discrete-time controlled particle system with shared actions, exhibiting noise-free McKean-Vlasov dynamics. While the resulting dynamics is not Markovian, we show that lifting it to probability measures produces a fully-observed Markov decision process (MDP). Positional encodings are incorporated into the state space to preserve the sequence order under lifting. Using the dynamic programming principle, we establish the existence of globally optimal policies under mild assumptions of compactness. We further prove that closed-loop policies in the lifted is equivalent to an initial-distribution dependent open-loop policy, which are realized-input-independent and compatible with standard Transformer training. To train a Transformer, we propose a triply quantized training procedure for the lifted MDP by quantizing the state space, the space of probability measures, and the action space, and show that any optimal policy for the triply quantized model is near-optimal for the original training problem. Finally, we establish stability and empirical consistency properties of the lifted model by showing that the value function is continuous with respect to the perturbations of the initial empirical measures and convergence of policies as the data size increases. This approach provides a globally optimal and robust alternative to gradient-based training without requiring smoothness or convexity.
Paths to Equilibrium in Normal-Form Games
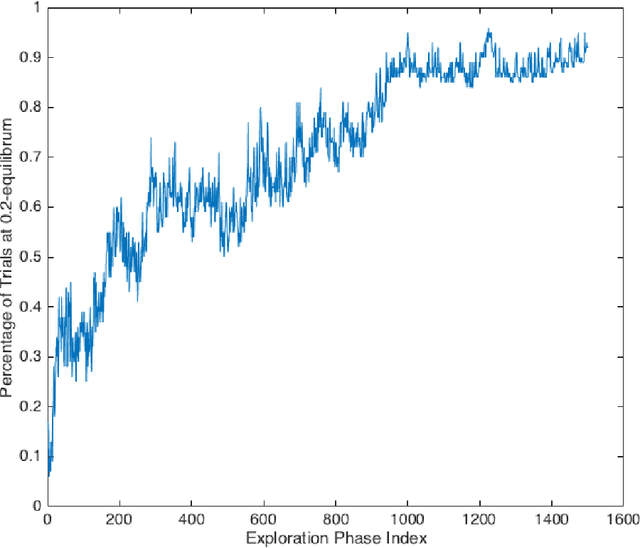
Mar 26, 2024In multi-agent reinforcement learning (MARL), agents repeatedly interact across time and revise their strategies as new data arrives, producing a sequence of strategy profiles. This paper studies sequences of strategies satisfying a pairwise constraint inspired by policy updating in reinforcement learning, where an agent who is best responding in period $t$ does not switch its strategy in the next period $t+1$. This constraint merely requires that optimizing agents do not switch strategies, but does not constrain the other non-optimizing agents in any way, and thus allows for exploration. Sequences with this property are called satisficing paths, and arise naturally in many MARL algorithms. A fundamental question about strategic dynamics is such: for a given game and initial strategy profile, is it always possible to construct a satisficing path that terminates at an equilibrium strategy? The resolution of this question has implications about the capabilities or limitations of a class of MARL algorithms. We answer this question in the affirmative for mixed extensions of finite normal-form games.%
Asynchronous Decentralized Q-Learning: Two Timescale Analysis By Persistence
Aug 07, 2023



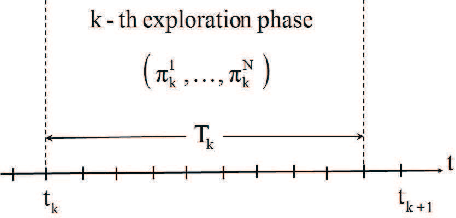
Non-stationarity is a fundamental challenge in multi-agent reinforcement learning (MARL), where agents update their behaviour as they learn. Many theoretical advances in MARL avoid the challenge of non-stationarity by coordinating the policy updates of agents in various ways, including synchronizing times at which agents are allowed to revise their policies. Synchronization enables analysis of many MARL algorithms via multi-timescale methods, but such synchrony is infeasible in many decentralized applications. In this paper, we study an asynchronous variant of the decentralized Q-learning algorithm, a recent MARL algorithm for stochastic games. We provide sufficient conditions under which the asynchronous algorithm drives play to equilibrium with high probability. Our solution utilizes constant learning rates in the Q-factor update, which we show to be critical for relaxing the synchrony assumptions of earlier work. Our analysis also applies to asynchronous generalizations of a number of other algorithms from the regret testing tradition, whose performance is analyzed by multi-timescale methods that study Markov chains obtained via policy update dynamics. This work extends the applicability of the decentralized Q-learning algorithm and its relatives to settings in which parameters are selected in an independent manner, and tames non-stationarity without imposing the coordination assumptions of prior work.
Decentralized Multi-Agent Reinforcement Learning for Continuous-Space Stochastic Games
Mar 16, 2023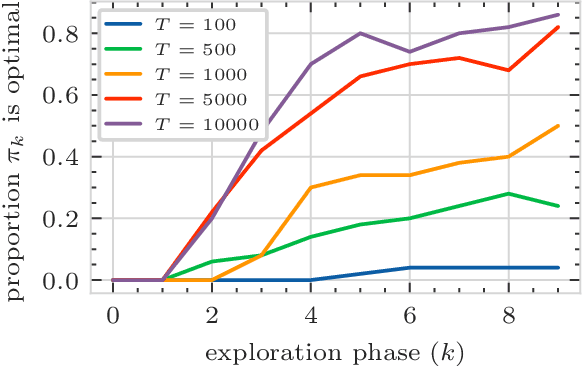
Stochastic games are a popular framework for studying multi-agent reinforcement learning (MARL). Recent advances in MARL have focused primarily on games with finitely many states. In this work, we study multi-agent learning in stochastic games with general state spaces and an information structure in which agents do not observe each other's actions. In this context, we propose a decentralized MARL algorithm and we prove the near-optimality of its policy updates. Furthermore, we study the global policy-updating dynamics for a general class of best-reply based algorithms and derive a closed-form characterization of convergence probabilities over the joint policy space.
Q-Learning for MDPs with General Spaces: Convergence and Near Optimality via Quantization under Weak Continuity
Nov 12, 2021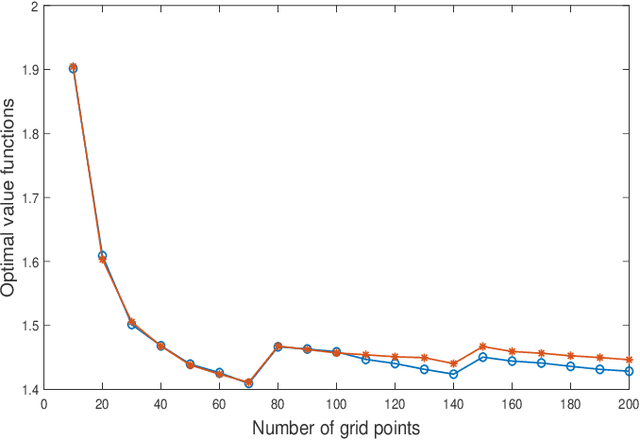
Reinforcement learning algorithms often require finiteness of state and action spaces in Markov decision processes (MDPs) and various efforts have been made in the literature towards the applicability of such algorithms for continuous state and action spaces. In this paper, we show that under very mild regularity conditions (in particular, involving only weak continuity of the transition kernel of an MDP), Q-learning for standard Borel MDPs via quantization of states and actions converge to a limit, and furthermore this limit satisfies an optimality equation which leads to near optimality with either explicit performance bounds or which are guaranteed to be asymptotically optimal. Our approach builds on (i) viewing quantization as a measurement kernel and thus a quantized MDP as a POMDP, (ii) utilizing near optimality and convergence results of Q-learning for POMDPs, and (iii) finally, near-optimality of finite state model approximations for MDPs with weakly continuous kernels which we show to correspond to the fixed point of the constructed POMDP. Thus, our paper presents a very general convergence and approximation result for the applicability of Q-learning for continuous MDPs.
An Independent Learning Algorithm for a Class of Symmetric Stochastic Games
Oct 09, 2021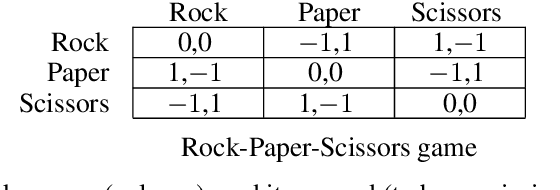

In multi-agent reinforcement learning, independent learners are those that do not access the action selections of other learning agents in the system. This paper investigates the feasibility of using independent learners to find approximate equilibrium policies in non-episodic, discounted stochastic games. We define a property, here called the $\epsilon$-revision paths property, and prove that a class of games exhibiting symmetry among the players has this property for any $\epsilon \geq 0$. Building on this result, we present an independent learning algorithm that comes with high probability guarantees of approximate equilibrium in this class of games. This guarantee is made assuming symmetry alone, without additional assumptions such as a zero sum, team, or potential game structure.
Decentralized Q-Learning for Stochastic Teams and Games
May 02, 2016

There are only a few learning algorithms applicable to stochastic dynamic teams and games which generalize Markov decision processes to decentralized stochastic control problems involving possibly self-interested decision makers. Learning in games is generally difficult because of the non-stationary environment in which each decision maker aims to learn its optimal decisions with minimal information in the presence of the other decision makers who are also learning. In stochastic dynamic games, learning is more challenging because, while learning, the decision makers alter the state of the system and hence the future cost. In this paper, we present decentralized Q-learning algorithms for stochastic games, and study their convergence for the weakly acyclic case which includes team problems as an important special case. The algorithm is decentralized in that each decision maker has access to only its local information, the state information, and the local cost realizations; furthermore, it is completely oblivious to the presence of other decision makers. We show that these algorithms converge to equilibrium policies almost surely in large classes of stochastic games.