 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeATEX-CF: Attack-Informed Counterfactual Explanations for Graph Neural Networks
Feb 05, 2026Counterfactual explanations offer an intuitive way to interpret graph neural networks (GNNs) by identifying minimal changes that alter a model's prediction, thereby answering "what must differ for a different outcome?". In this work, we propose a novel framework, ATEX-CF that unifies adversarial attack techniques with counterfactual explanation generation-a connection made feasible by their shared goal of flipping a node's prediction, yet differing in perturbation strategy: adversarial attacks often rely on edge additions, while counterfactual methods typically use deletions. Unlike traditional approaches that treat explanation and attack separately, our method efficiently integrates both edge additions and deletions, grounded in theory, leveraging adversarial insights to explore impactful counterfactuals. In addition, by jointly optimizing fidelity, sparsity, and plausibility under a constrained perturbation budget, our method produces instance-level explanations that are both informative and realistic. Experiments on synthetic and real-world node classification benchmarks demonstrate that ATEX-CF generates faithful, concise, and plausible explanations, highlighting the effectiveness of integrating adversarial insights into counterfactual reasoning for GNNs.
DiffMM: Efficient Method for Accurate Noisy and Sparse Trajectory Map Matching via One Step Diffusion
Jan 13, 2026Map matching for sparse trajectories is a fundamental problem for many trajectory-based applications, e.g., traffic scheduling and traffic flow analysis. Existing methods for map matching are generally based on Hidden Markov Model (HMM) or encoder-decoder framework. However, these methods continue to face significant challenges when handling noisy or sparsely sampled GPS trajectories. To address these limitations, we propose DiffMM, an encoder-diffusion-based map matching framework that produces effective yet efficient matching results through a one-step diffusion process. We first introduce a road segment-aware trajectory encoder that jointly embeds the input trajectory and its surrounding candidate road segments into a shared latent space through an attention mechanism. Next, we propose a one step diffusion method to realize map matching through a shortcut model by leveraging the joint embedding of the trajectory and candidate road segments as conditioning context. We conduct extensive experiments on large-scale trajectory datasets, demonstrating that our approach consistently outperforms state-of-the-art map matching methods in terms of both accuracy and efficiency, particularly for sparse trajectories and complex road network topologies.
MM-Path: Multi-modal, Multi-granularity Path Representation Learning -- Extended Version
Nov 28, 2024



Developing effective path representations has become increasingly essential across various fields within intelligent transportation. Although pre-trained path representation learning models have shown improved performance, they predominantly focus on the topological structures from single modality data, i.e., road networks, overlooking the geometric and contextual features associated with path-related images, e.g., remote sensing images. Similar to human understanding, integrating information from multiple modalities can provide a more comprehensive view, enhancing both representation accuracy and generalization. However, variations in information granularity impede the semantic alignment of road network-based paths (road paths) and image-based paths (image paths), while the heterogeneity of multi-modal data poses substantial challenges for effective fusion and utilization. In this paper, we propose a novel Multi-modal, Multi-granularity Path Representation Learning Framework (MM-Path), which can learn a generic path representation by integrating modalities from both road paths and image paths. To enhance the alignment of multi-modal data, we develop a multi-granularity alignment strategy that systematically associates nodes, road sub-paths, and road paths with their corresponding image patches, ensuring the synchronization of both detailed local information and broader global contexts. To address the heterogeneity of multi-modal data effectively, we introduce a graph-based cross-modal residual fusion component designed to comprehensively fuse information across different modalities and granularities. Finally, we conduct extensive experiments on two large-scale real-world datasets under two downstream tasks, validating the effectiveness of the proposed MM-Path. The code is available at: https://github.com/decisionintelligence/MM-Path.
LightPath: Lightweight and Scalable Path Representation Learning
Jul 19, 2023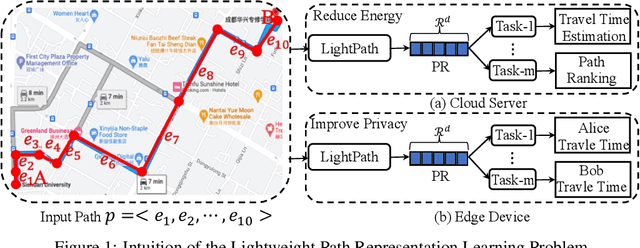



Movement paths are used widely in intelligent transportation and smart city applications. To serve such applications, path representation learning aims to provide compact representations of paths that enable efficient and accurate operations when used for different downstream tasks such as path ranking and travel cost estimation. In many cases, it is attractive that the path representation learning is lightweight and scalable; in resource-limited environments and under green computing limitations, it is essential. Yet, existing path representation learning studies focus on accuracy and pay at most secondary attention to resource consumption and scalability. We propose a lightweight and scalable path representation learning framework, termed LightPath, that aims to reduce resource consumption and achieve scalability without affecting accuracy, thus enabling broader applicability. More specifically, we first propose a sparse auto-encoder that ensures that the framework achieves good scalability with respect to path length. Next, we propose a relational reasoning framework to enable faster training of more robust sparse path encoders. We also propose global-local knowledge distillation to further reduce the size and improve the performance of sparse path encoders. Finally, we report extensive experiments on two real-world datasets to offer insight into the efficiency, scalability, and effectiveness of the proposed framework.
Weakly-supervised Temporal Path Representation Learning with Contrastive Curriculum Learning -- Extended Version
Apr 15, 2022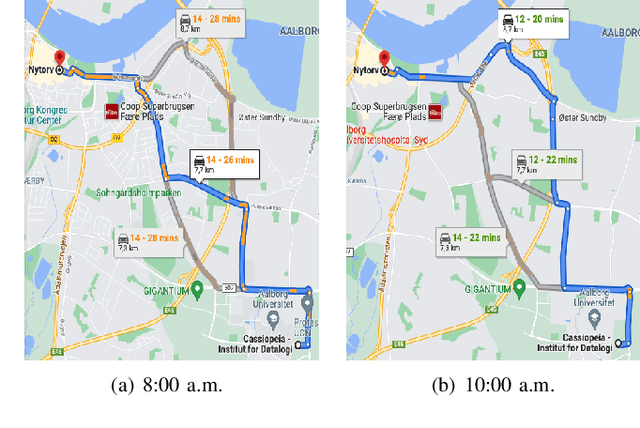
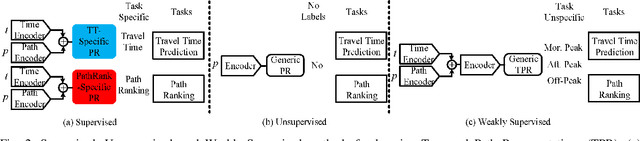
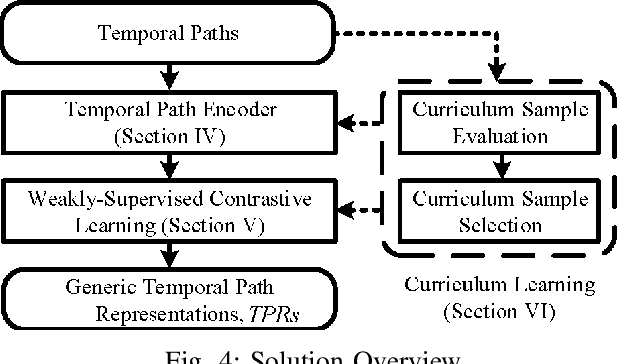
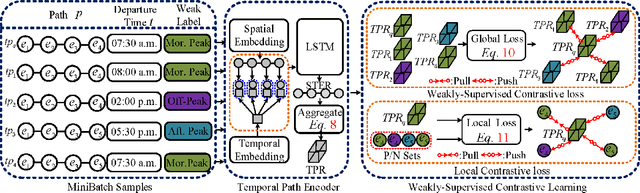
In step with the digitalization of transportation, we are witnessing a growing range of path-based smart-city applications, e.g., travel-time estimation and travel path ranking. A temporal path(TP) that includes temporal information, e.g., departure time, into the path is fundamental to enable such applications. In this setting, it is essential to learn generic temporal path representations(TPRs) that consider spatial and temporal correlations simultaneously and that can be used in different applications, i.e., downstream tasks. Existing methods fail to achieve the goal since (i) supervised methods require large amounts of task-specific labels when training and thus fail to generalize the obtained TPRs to other tasks; (ii) through unsupervised methods can learn generic representations, they disregard the temporal aspect, leading to sub-optimal results. To contend with the limitations of existing solutions, we propose a Weakly-Supervised Contrastive (WSC) learning model. We first propose a temporal path encoder that encodes both the spatial and temporal information of a temporal path into a TPR. To train the encoder, we introduce weak labels that are easy and inexpensive to obtain and are relevant to different tasks, e.g., temporal labels indicating peak vs. off-peak hours from departure times. Based on the weak labels, we construct meaningful positive and negative temporal path samples by considering both spatial and temporal information, which facilities training the encoder using contrastive learning by pulling closer to the positive samples' representations while pushing away the negative samples' representations. To better guide contrastive learning, we propose a learning strategy based on Curriculum Learning such that the learning performs from easy to hard training instances. Experiments studies verify the effectiveness of the proposed method.
Unsupervised Path Representation Learning with Curriculum Negative Sampling
Jun 17, 2021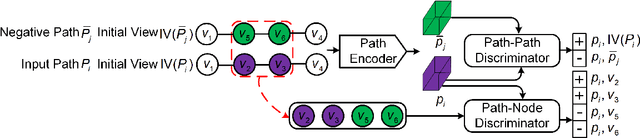
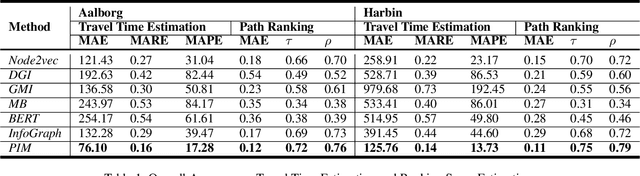
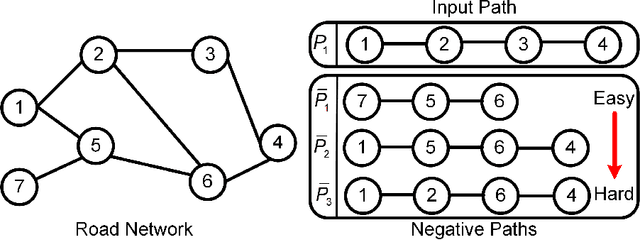
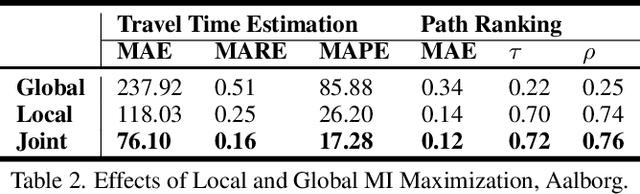
Path representations are critical in a variety of transportation applications, such as estimating path ranking in path recommendation systems and estimating path travel time in navigation systems. Existing studies often learn task-specific path representations in a supervised manner, which require a large amount of labeled training data and generalize poorly to other tasks. We propose an unsupervised learning framework Path InfoMax (PIM) to learn generic path representations that work for different downstream tasks. We first propose a curriculum negative sampling method, for each input path, to generate a small amount of negative paths, by following the principles of curriculum learning. Next, \emph{PIM} employs mutual information maximization to learn path representations from both a global and a local view. In the global view, PIM distinguishes the representations of the input paths from those of the negative paths. In the local view, \emph{PIM} distinguishes the input path representations from the representations of the nodes that appear only in the negative paths. This enables the learned path representations to encode both global and local information at different scales. Extensive experiments on two downstream tasks, ranking score estimation and travel time estimation, using two road network datasets suggest that PIM significantly outperforms other unsupervised methods and is also able to be used as a pre-training method to enhance supervised path representation learning.
PathRank: A Multi-Task Learning Framework to Rank Paths in Spatial Networks
Jul 09, 2019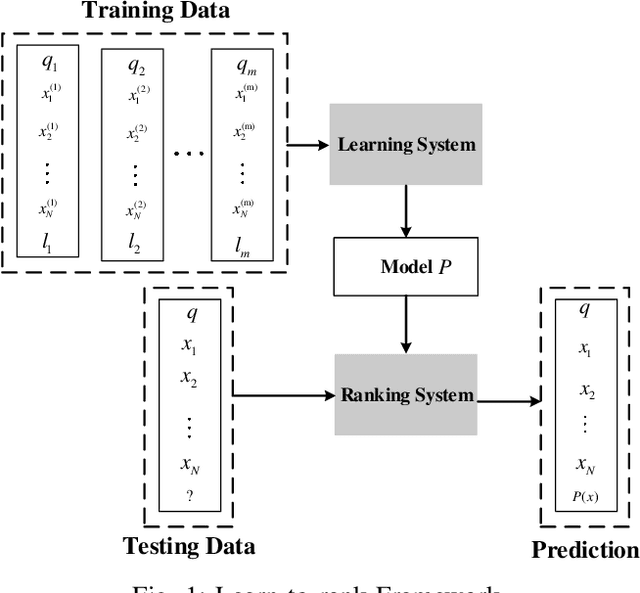
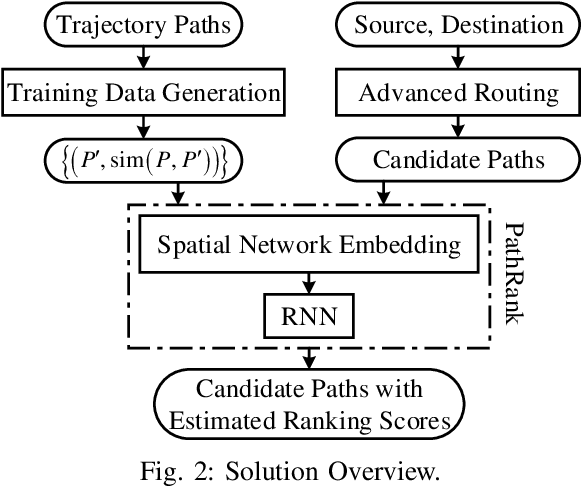
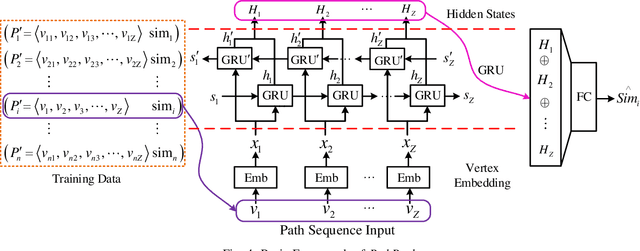
Modern navigation services often provide multiple paths connecting the same source and destination for users to select. Hence, ranking such paths becomes increasingly important, which directly affects the service quality. We present PathRank, a data-driven framework for ranking paths based on historical trajectories using multi-task learning. If a trajectory used path P from source s to destination d, PathRank considers this as an evidence that P is preferred over all other paths from s to d. Thus, a path that is similar to P should have a larger ranking score than a path that is dissimilar to P. Based on this intuition, PathRank models path ranking as a regression problem, where each path is associated with a ranking score. To enable PathRank, we first propose an effective method to generate a compact set of training data: for each trajectory, we generate a small set of diversified paths. Next, we propose a multi-task learning framework to solve the regression problem. In particular, a spatial network embedding is proposed to embed each vertex to a feature vector by considering both road network topology and spatial properties, such as distances and travel times. Since a path is represented by a sequence of vertices, which is now a sequence of feature vectors after embedding, recurrent neural network is applied to model the sequence. The objective function is designed to consider errors on both ranking scores and spatial properties, making the framework a multi-task learning framework. Empirical studies on a substantial trajectory data set offer insight into the designed properties of the proposed framework and indicating that it is effective and practical.