 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Representations for Time-varying Brain Datasets
May 23, 2022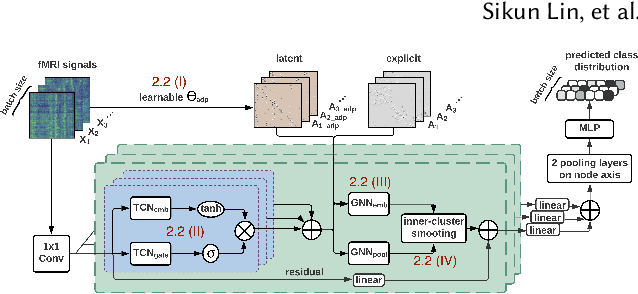

Finding an appropriate representation of dynamic activities in the brain is crucial for many downstream applications. Due to its highly dynamic nature, temporally averaged fMRI (functional magnetic resonance imaging) can only provide a narrow view of underlying brain activities. Previous works lack the ability to learn and interpret the latent dynamics in brain architectures. This paper builds an efficient graph neural network model that incorporates both region-mapped fMRI sequences and structural connectivities obtained from DWI (diffusion-weighted imaging) as inputs. We find good representations of the latent brain dynamics through learning sample-level adaptive adjacency matrices and performing a novel multi-resolution inner cluster smoothing. These modules can be easily adapted to and are potentially useful for other applications outside the neuroscience domain. We also attribute inputs with integrated gradients, which enables us to infer (1) highly involved brain connections and subnetworks for each task, (2) temporal keyframes of imaging sequences that characterize tasks, and (3) subnetworks that discriminate between individual subjects. This ability to identify critical subnetworks that characterize signal states across heterogeneous tasks and individuals is of great importance to neuroscience and other scientific domains. Extensive experiments and ablation studies demonstrate our proposed method's superiority and efficiency in spatial-temporal graph signal modeling with insightful interpretations of brain dynamics.
SSCR: Iterative Language-Based Image Editing via Self-Supervised Counterfactual Reasoning
Sep 29, 2020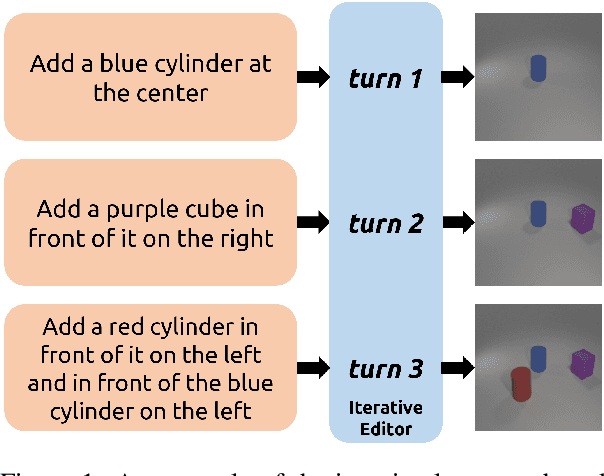
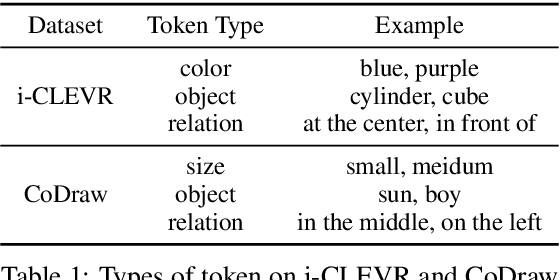
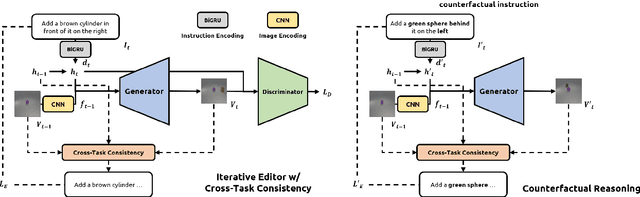
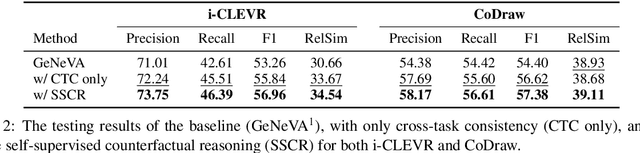
Iterative Language-Based Image Editing (IL-BIE) tasks follow iterative instructions to edit images step by step. Data scarcity is a significant issue for ILBIE as it is challenging to collect large-scale examples of images before and after instruction-based changes. However, humans still accomplish these editing tasks even when presented with an unfamiliar image-instruction pair. Such ability results from counterfactual thinking and the ability to think about alternatives to events that have happened already. In this paper, we introduce a Self-Supervised Counterfactual Reasoning (SSCR) framework that incorporates counterfactual thinking to overcome data scarcity. SSCR allows the model to consider out-of-distribution instructions paired with previous images. With the help of cross-task consistency (CTC), we train these counterfactual instructions in a self-supervised scenario. Extensive results show that SSCR improves the correctness of ILBIE in terms of both object identity and position, establishing a new state of the art (SOTA) on two IBLIE datasets (i-CLEVR and CoDraw). Even with only 50% of the training data, SSCR achieves a comparable result to using complete data.
Counterfactual Vision-and-Language Navigation via Adversarial Path Sampling
Nov 17, 2019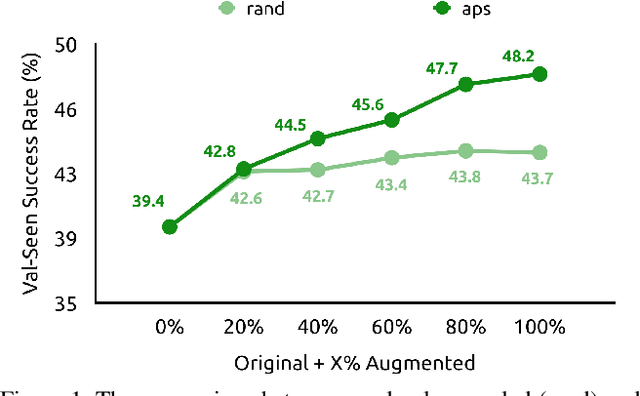
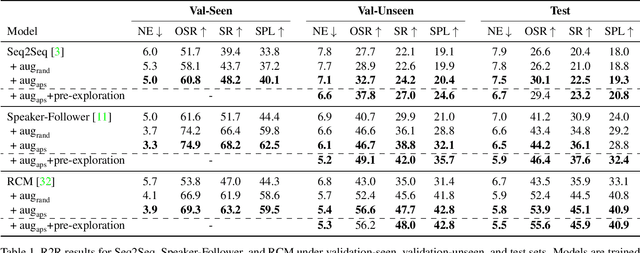
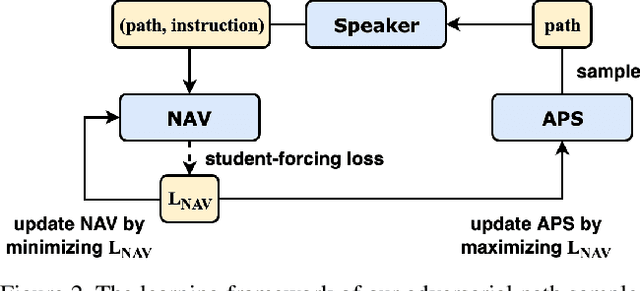
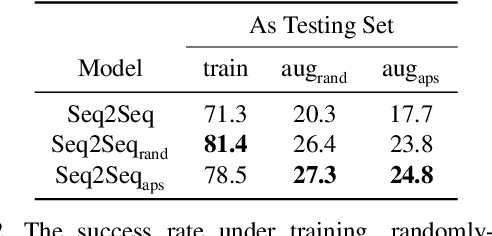
Vision-and-Language Navigation (VLN) is a task where agents must decide how to move through a 3D environment to reach a goal by grounding natural language instructions to the visual surroundings. One of the problems of the VLN task is data scarcity since it is difficult to collect enough navigation paths with human-annotated instructions for interactive environments. In this paper, we explore the use of counterfactual thinking as a human-inspired data augmentation method that results in robust models. Counterfactual thinking is a concept that describes the human propensity to create possible alternatives to life events that have already occurred. We propose an adversarial-driven counterfactual reasoning model that can consider effective conditions instead of low-quality augmented data. In particular, we present a model-agnostic adversarial path sampler (APS) that learns to sample challenging paths that force the navigator to improve based on the navigation performance. APS also serves to do pre-exploration of unseen environments to strengthen the model's ability to generalize. We evaluate the influence of APS on the performance of different VLN baseline models using the room-to-room dataset (R2R). The results show that the adversarial training process with our proposed APS benefits VLN models under both seen and unseen environments. And the pre-exploration process can further gain additional improvements under unseen environments.