 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHypercomplex Widely Linear Processing: Fundamentals for Quaternion Machine Learning
Mar 12, 2026Numerous attempts have been made to replicate the success of complex-valued algebra in engineering and science to other hypercomplex domains such as quaternions, tessarines, biquaternions, and octonions. Perhaps, none have matched the success of quaternions. The most useful feature of quaternions lies in their ability to model three-dimensional rotations which, in turn, have found various industrial applications such as in aeronautics and computergraphics. Recently, we have witnessed a renaissance of quaternions due to the rise of machine learning. To equip the reader to contribute to this emerging research area, this chapter lays down the foundation for: - augmented statistics for modelling quaternion-valued random processes, - widely linear models to exploit such advanced statistics, - quaternion calculus and algebra for algorithmic derivations, - mean square estimation for practical considerations. For ease of exposure, several examples are offered to facilitate the learning, understanding, and(hopefully) the adoption of this multidimensional domain.
A Quantum of Learning: Using Quaternion Algebra to Model Learning on Quantum Devices
Apr 17, 2025This article considers the problem of designing adaption and optimisation techniques for training quantum learning machines. To this end, the division algebra of quaternions is used to derive an effective model for representing computation and measurement operations on qubits. In turn, the derived model, serves as the foundation for formulating an adaptive learning problem on principal quantum learning units, thereby establishing quantum information processing units akin to that of neurons in classical approaches. Then, leveraging the modern HR-calculus, a comprehensive training framework for learning on quantum machines is developed. The quaternion-valued model accommodates mathematical tractability and establishment of performance criteria, such as convergence conditions.
The HR-Calculus: Enabling Information Processing with Quaternion Algebra
Nov 28, 2023



From their inception, quaternions and their division algebra have proven to be advantageous in modelling rotation/orientation in three-dimensional spaces and have seen use from the initial formulation of electromagnetic filed theory through to forming the basis of quantum filed theory. Despite their impressive versatility in modelling real-world phenomena, adaptive information processing techniques specifically designed for quaternion-valued signals have only recently come to the attention of the machine learning, signal processing, and control communities. The most important development in this direction is introduction of the HR-calculus, which provides the required mathematical foundation for deriving adaptive information processing techniques directly in the quaternion domain. In this article, the foundations of the HR-calculus are revised and the required tools for deriving adaptive learning techniques suitable for dealing with quaternion-valued signals, such as the gradient operator, chain and product derivative rules, and Taylor series expansion are presented. This serves to establish the most important applications of adaptive information processing in the quaternion domain for both single-node and multi-node formulations. The article is supported by Supplementary Material, which will be referred to as SM.
On the dynamics of multi agent nonlinear filtering and learning
Sep 19, 2023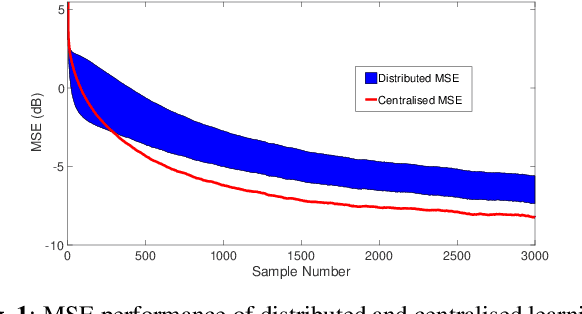
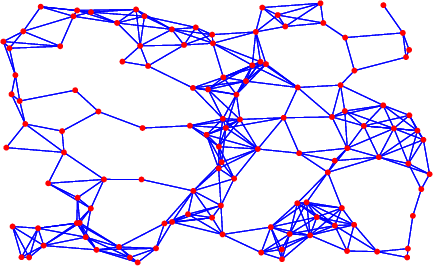
Multiagent systems aim to accomplish highly complex learning tasks through decentralised consensus seeking dynamics and their use has garnered a great deal of attention in the signal processing and computational intelligence societies. This article examines the behaviour of multiagent networked systems with nonlinear filtering/learning dynamics. To this end, a general formulation for the actions of an agent in multiagent networked systems is presented and conditions for achieving a cohesive learning behaviour is given. Importantly, application of the so derived framework in distributed and federated learning scenarios are presented.
On Stability and Convergence of Distributed Filters
Feb 22, 2021


Recent years have bore witness to the proliferation of distributed filtering techniques, where a collection of agents communicating over an ad-hoc network aim to collaboratively estimate and track the state of a system. These techniques form the enabling technology of modern multi-agent systems and have gained great importance in the engineering community. Although most distributed filtering techniques come with a set of stability and convergence criteria, the conditions imposed are found to be unnecessarily restrictive. The paradigm of stability and convergence in distributed filtering is revised in this manuscript. Accordingly, a general distributed filter is constructed and its estimation error dynamics is formulated. The conducted analysis demonstrates that conditions for achieving stable filtering operations are the same as those required in the centralized filtering setting. Finally, the concepts are demonstrated in a Kalman filtering framework and validated using simulation examples.
A Distributed Quaternion Kalman Filter With Applications to Fly-by-Wire Systems
Jul 21, 2016


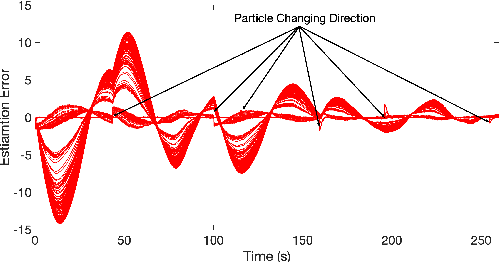
The introduction of automated flight control and management systems have made possible aircraft designs that sacrifice arodynamic stability in order to incorporate stealth technology intro their shape, operate more efficiently, and are highly maneuverable. Therefore, modern flight management systems are reliant on multiple redundant sensors to monitor and control the rotations of the aircraft. To this end, a novel distributed quaternion Kalman filtering algorithm is developed for tracking the rotation and orientation of an aircraft in the three-dimensional space. The algorithm is developed to distribute computation among the sensors in a manner that forces them to consent to a unique solution while being robust to sensor and link failure, a desirable characteristic for flight management systems. In addition, the underlying quaternion-valued state space model allows to avoid problems associated with gimbal lock. The performance of the developed algorithm is verified through simulations.
Frequency estimation in three-phase power systems with harmonic contamination: A multistage quaternion Kalman filtering approach
Mar 08, 2016



Motivated by the need for accurate frequency information, a novel algorithm for estimating the fundamental frequency and its rate of change in three-phase power systems is developed. This is achieved through two stages of Kalman filtering. In the first stage a quaternion extended Kalman filter, which provides a unified framework for joint modeling of voltage measurements from all the phases, is used to estimate the instantaneous phase increment of the three-phase voltages. The phase increment estimates are then used as observations of the extended Kalman filter in the second stage that accounts for the dynamic behavior of the system frequency and simultaneously estimates the fundamental frequency and its rate of change. The framework is then extended to account for the presence of harmonics. Finally, the concept is validated through simulation on both synthetic and real-world data.