 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAim My Robot: Precision Local Navigation to Any Object
Nov 22, 2024Existing navigation systems mostly consider "success" when the robot reaches within 1m radius to a goal. This precision is insufficient for emerging applications where the robot needs to be positioned precisely relative to an object for downstream tasks, such as docking, inspection, and manipulation. To this end, we design and implement Aim-My-Robot (AMR), a local navigation system that enables a robot to reach any object in its vicinity at the desired relative pose, with centimeter-level precision. AMR achieves high precision and robustness by leveraging multi-modal perception, precise action prediction, and is trained on large-scale photorealistic data generated in simulation. AMR shows strong sim2real transfer and can adapt to different robot kinematics and unseen objects with little to no fine-tuning.
2-speed network ensemble for efficient classification of incremental land-use/land-cover satellite image chips
Mar 15, 2022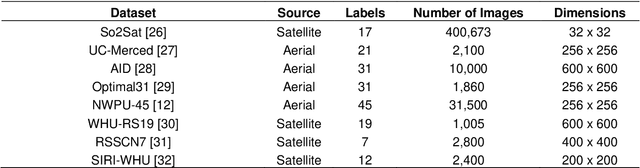
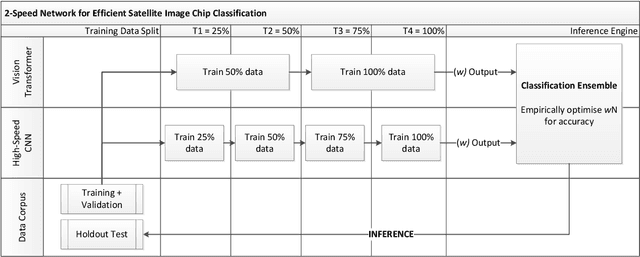


The ever-growing volume of satellite imagery data presents a challenge for industry and governments making data-driven decisions based on the timely analysis of very large data sets. Commonly used deep learning algorithms for automatic classification of satellite images are time and resource-intensive to train. The cost of retraining in the context of Big Data presents a practical challenge when new image data and/or classes are added to a training corpus. Recognizing the need for an adaptable, accurate, and scalable satellite image chip classification scheme, in this research we present an ensemble of: i) a slow to train but high accuracy vision transformer; and ii) a fast to train, low-parameter convolutional neural network. The vision transformer model provides a scalable and accurate foundation model. The high-speed CNN provides an efficient means of incorporating newly labelled data into analysis, at the expense of lower accuracy. To simulate incremental data, the very large (~400,000 images) So2Sat LCZ42 satellite image chip dataset is divided into four intervals, with the high-speed CNN retrained every interval and the vision transformer trained every half interval. This experimental setup mimics an increase in data volume and diversity over time. For the task of automated land-cover/land-use classification, the ensemble models for each data increment outperform each of the component models, with best accuracy of 65% against a holdout test partition of the So2Sat dataset. The proposed ensemble and staggered training schedule provide a scalable and cost-effective satellite image classification scheme that is optimized to process very large volumes of satellite data.