 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance Dependency of LSTM and NAR Beamformers With Respect to Sensor Array Properties in V2I Scenario
Feb 17, 2021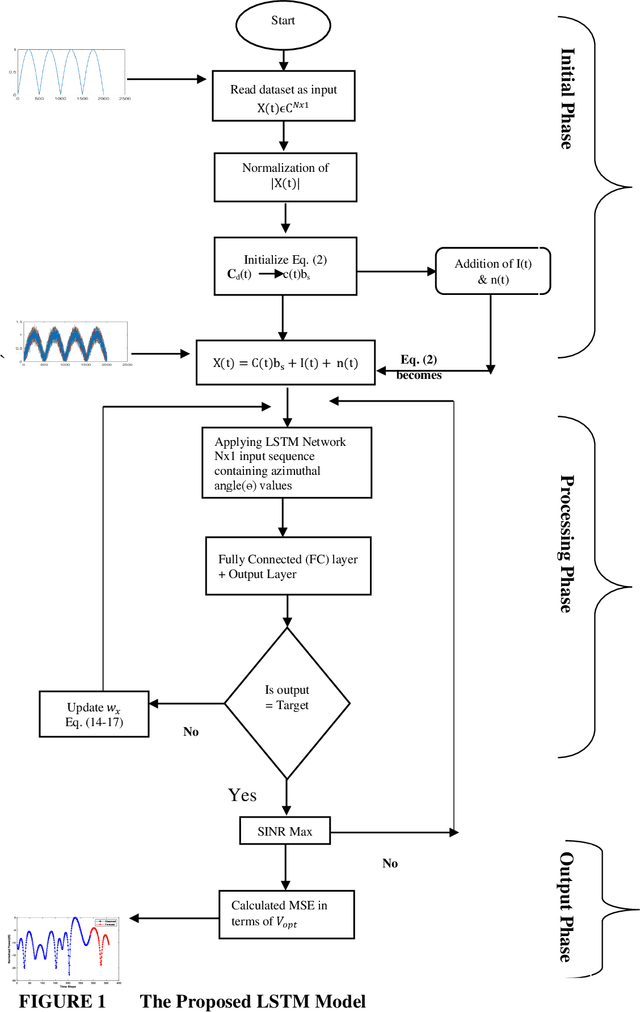
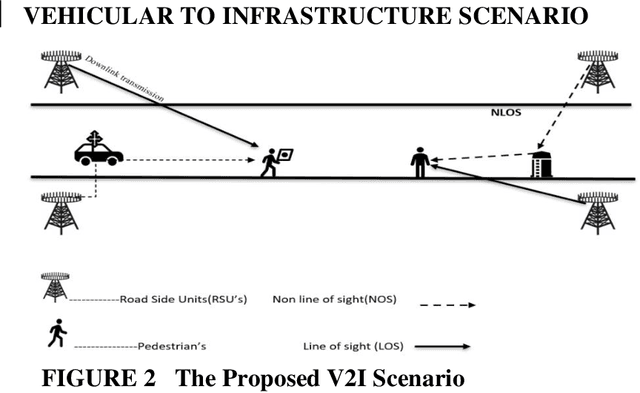
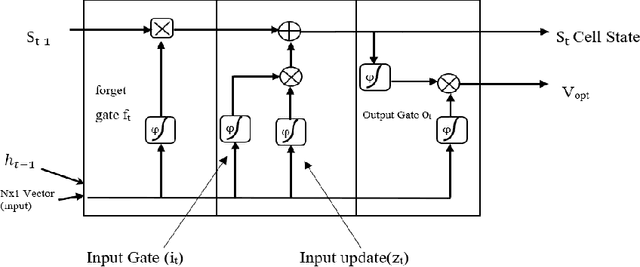
Prediction and nullifying the interference is a challenging problem in vehicle to infrastructure scenarios . The implementation of practical V2I network is limited because of inevitability of interference due to random nature of the wireless channel. The interference introduces angle ambiguity between the road side units mounted base station and user equipment. This paper proposes an adaptive beamforming technique for mitigation of interference in V2I networks, especially in multiuser environment. In this work , Long short term based (LSTM) based deep learning and non linear auto regresive technique based regressor have been employed to predict the angles between the road side units and user equipment .Advance prediction of transmit and receive signals enables reliable vehicle to infrastructure communication. Instead of predicting the beamforming matrix directly, we predict the main features using LSTM for learning dependencies in the input time series ,where complex variables were taken as input states and final beamformed signal was the output. simulation results have confirmed that the proposed LSTM model achieves comparable performance in terms of system throughput when compared with the non linear auto regressive method implemented as an artificial neural network.
Detection of Advanced Malware by Machine Learning Techniques
Mar 07, 2019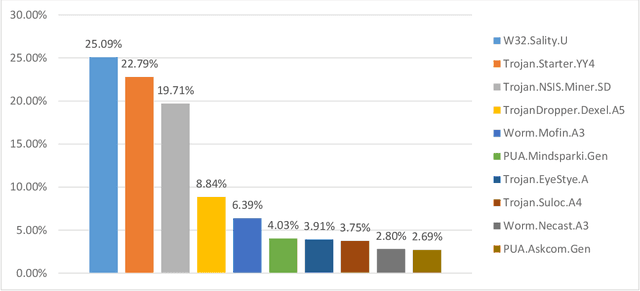
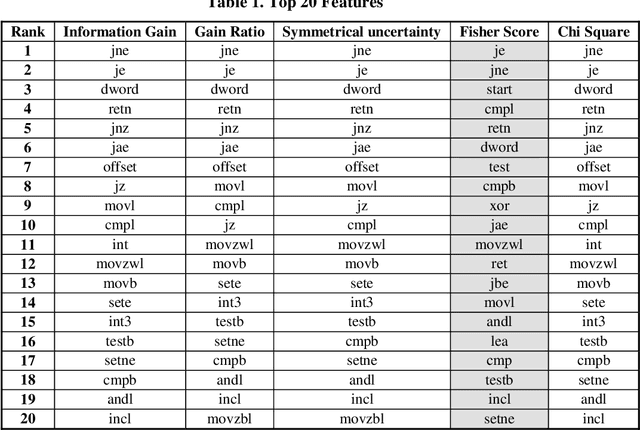
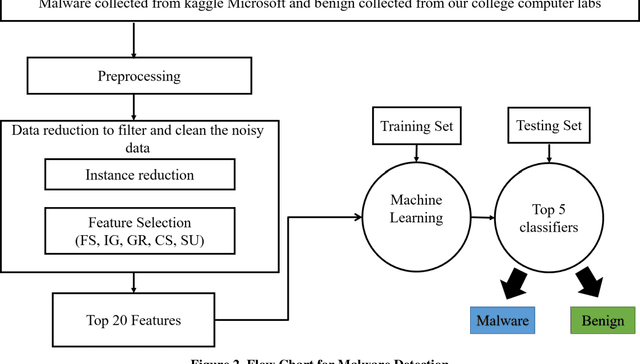
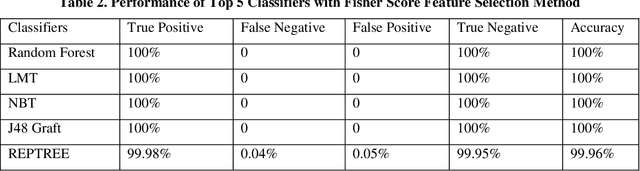
In today's digital world most of the anti-malware tools are signature based which is ineffective to detect advanced unknown malware viz. metamorphic malware. In this paper, we study the frequency of opcode occurrence to detect unknown malware by using machine learning technique. For the purpose, we have used kaggle Microsoft malware classification challenge dataset. The top 20 features obtained from fisher score, information gain, gain ratio, chi-square and symmetric uncertainty feature selection methods are compared. We also studied multiple classifier available in WEKA GUI based machine learning tool and found that five of them (Random Forest, LMT, NBT, J48 Graft and REPTree) detect malware with almost 100% accuracy.
* Conference Paper, 7 Pages
Autonomous Quadrotor Landing using Deep Reinforcement Learning
Feb 27, 2018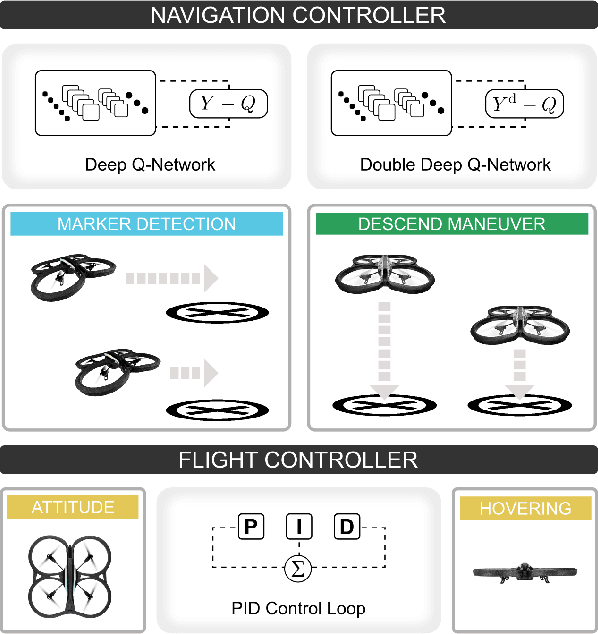
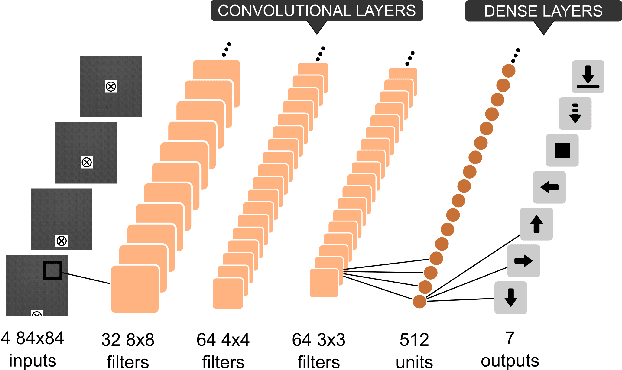
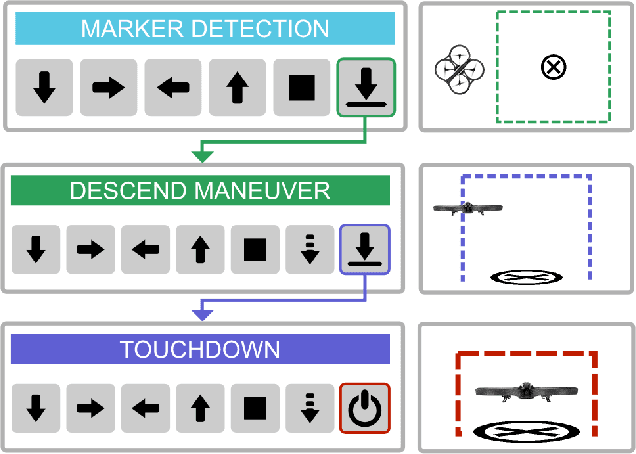
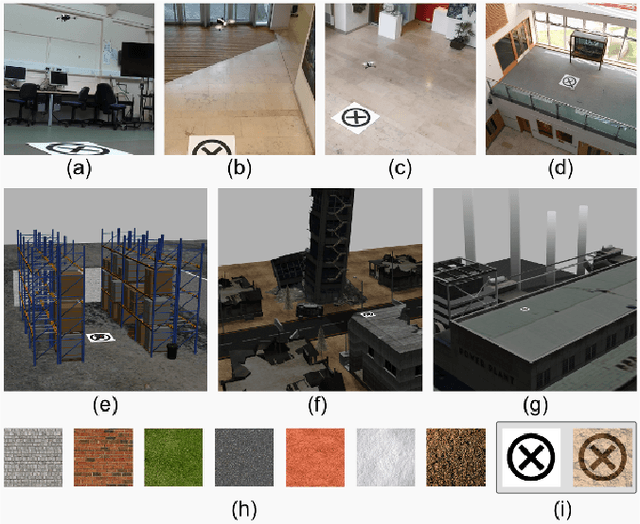
Landing an unmanned aerial vehicle (UAV) on a ground marker is an open problem despite the effort of the research community. Previous attempts mostly focused on the analysis of hand-crafted geometric features and the use of external sensors in order to allow the vehicle to approach the land-pad. In this article, we propose a method based on deep reinforcement learning that only requires low-resolution images taken from a down-looking camera in order to identify the position of the marker and land the UAV on it. The proposed approach is based on a hierarchy of Deep Q-Networks (DQNs) used as high-level control policy for the navigation toward the marker. We implemented different technical solutions, such as the combination of vanilla and double DQNs, and a partitioned buffer replay. Using domain randomization we trained the vehicle on uniform textures and we tested it on a large variety of simulated and real-world environments. The overall performance is comparable with a state-of-the-art algorithm and human pilots.
Monocular Visual Odometry for an Unmanned Sea-Surface Vehicle
Jul 19, 2017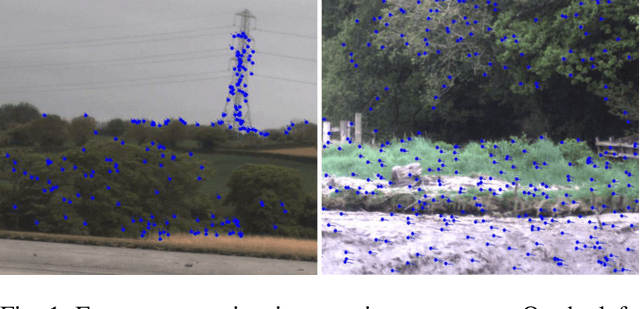
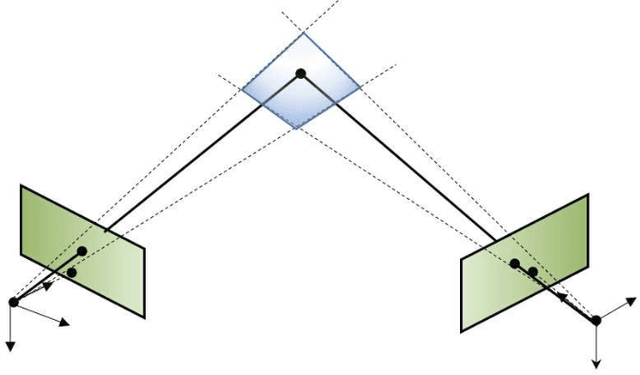

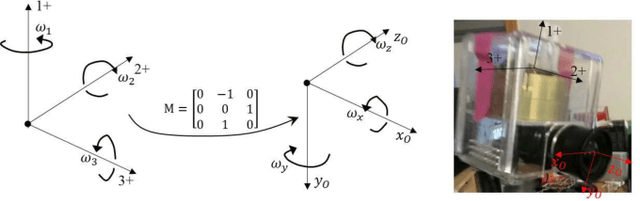
We tackle the problem of localizing an autonomous sea-surface vehicle in river estuarine areas using monocular camera and angular velocity input from an inertial sensor. Our method is challenged by two prominent drawbacks associated with the environment, which are typically not present in standard visual simultaneous localization and mapping (SLAM) applications on land (or air): a) Scene depth varies significantly (from a few meters to several kilometers) and, b) In conjunction to the latter, there exists no ground plane to provide features with enough disparity based on which to reliably detect motion. To that end, we use the IMU orientation feedback in order to re-cast the problem of visual localization without the mapping component, although the map can be implicitly obtained from the camera pose estimates. We find that our method produces reliable odometry estimates for trajectories several hundred meters long in the water. To compare the visual odometry estimates with GPS based ground truth, we interpolate the trajectory with splines on a common parameter and obtain position error in meters recovering an optimal affine transformation between the two splines.