 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Quadrotor Landing using Deep Reinforcement Learning
Paper and Code
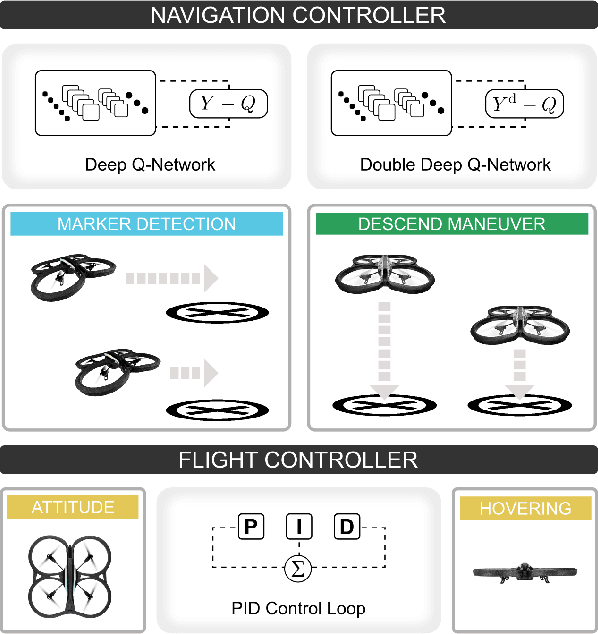
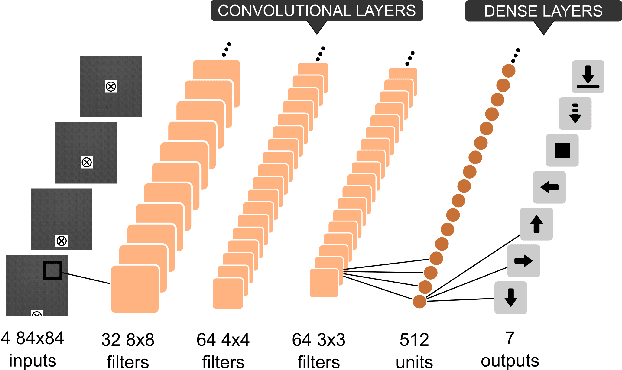
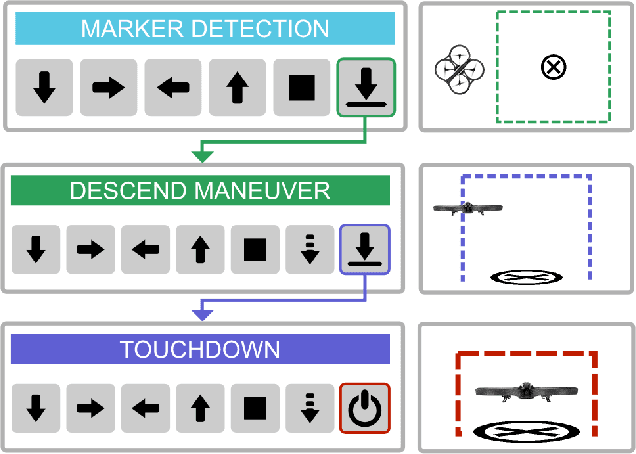
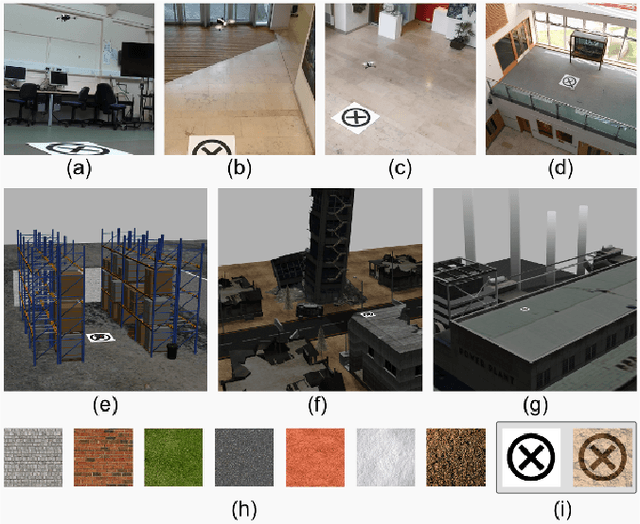
Landing an unmanned aerial vehicle (UAV) on a ground marker is an open problem despite the effort of the research community. Previous attempts mostly focused on the analysis of hand-crafted geometric features and the use of external sensors in order to allow the vehicle to approach the land-pad. In this article, we propose a method based on deep reinforcement learning that only requires low-resolution images taken from a down-looking camera in order to identify the position of the marker and land the UAV on it. The proposed approach is based on a hierarchy of Deep Q-Networks (DQNs) used as high-level control policy for the navigation toward the marker. We implemented different technical solutions, such as the combination of vanilla and double DQNs, and a partitioned buffer replay. Using domain randomization we trained the vehicle on uniform textures and we tested it on a large variety of simulated and real-world environments. The overall performance is comparable with a state-of-the-art algorithm and human pilots.