 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonocular Visual Odometry for an Unmanned Sea-Surface Vehicle
Jul 19, 2017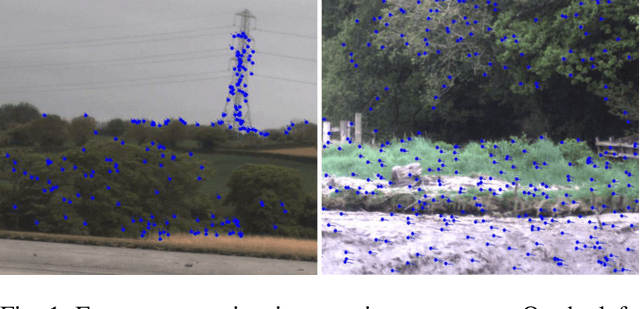
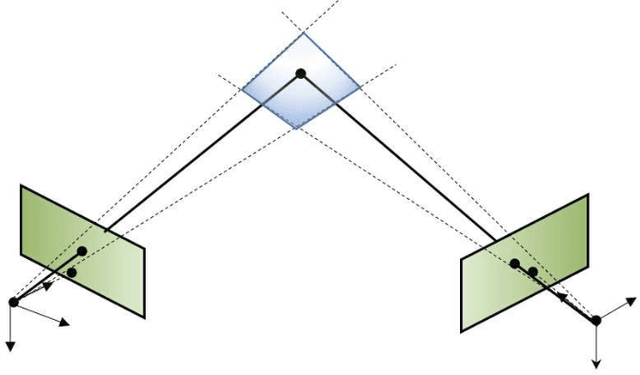

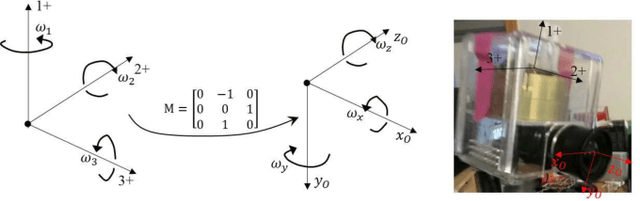
We tackle the problem of localizing an autonomous sea-surface vehicle in river estuarine areas using monocular camera and angular velocity input from an inertial sensor. Our method is challenged by two prominent drawbacks associated with the environment, which are typically not present in standard visual simultaneous localization and mapping (SLAM) applications on land (or air): a) Scene depth varies significantly (from a few meters to several kilometers) and, b) In conjunction to the latter, there exists no ground plane to provide features with enough disparity based on which to reliably detect motion. To that end, we use the IMU orientation feedback in order to re-cast the problem of visual localization without the mapping component, although the map can be implicitly obtained from the camera pose estimates. We find that our method produces reliable odometry estimates for trajectories several hundred meters long in the water. To compare the visual odometry estimates with GPS based ground truth, we interpolate the trajectory with splines on a common parameter and obtain position error in meters recovering an optimal affine transformation between the two splines.