 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJOBS: Joint-Sparse Optimization from Bootstrap Samples
Oct 08, 2018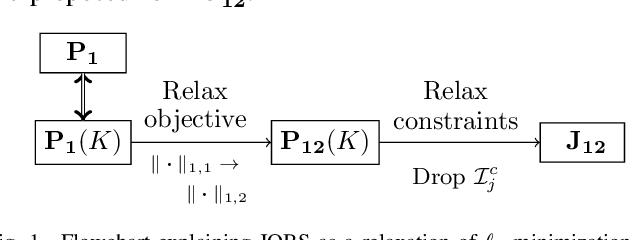
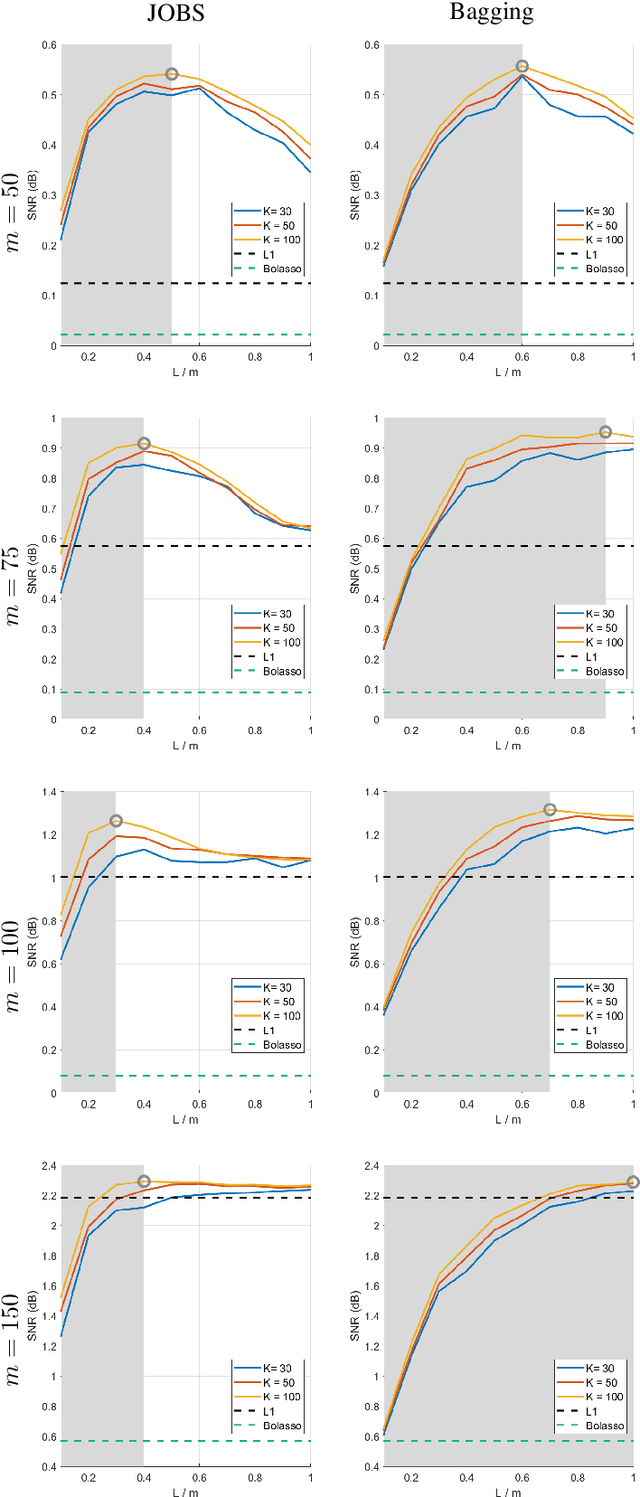
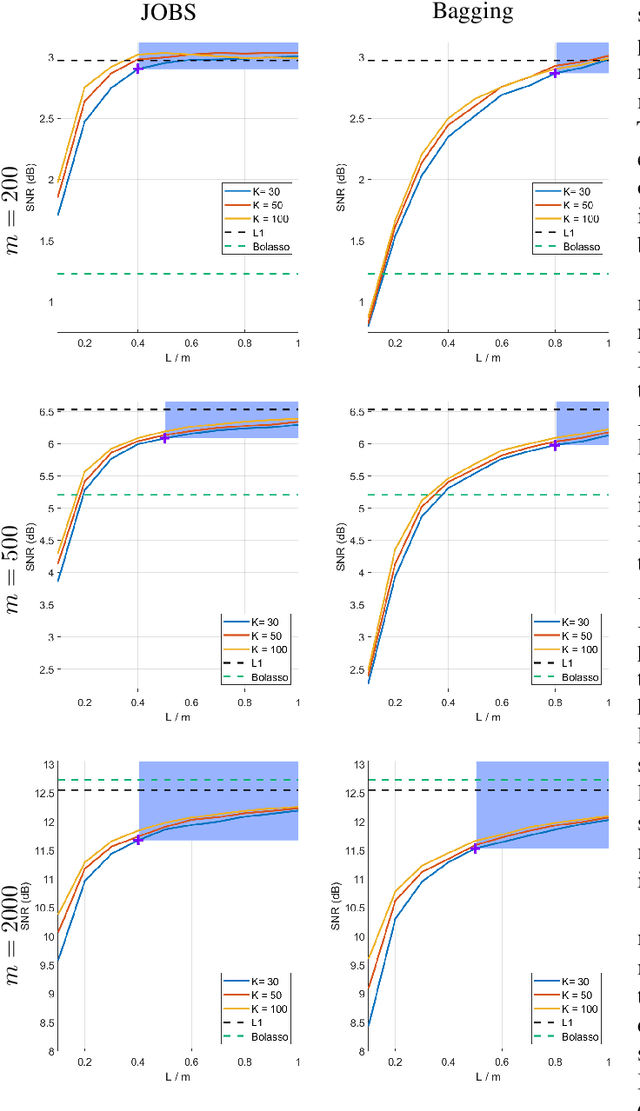
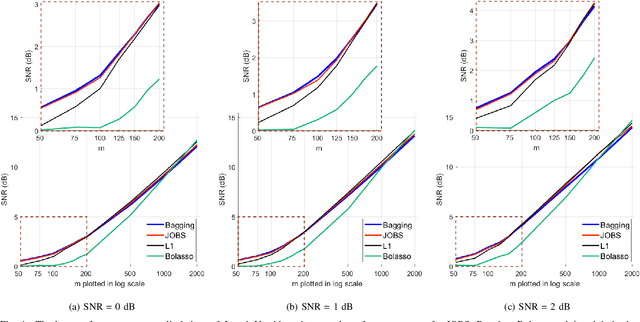
Classical signal recovery based on $\ell_1$ minimization solves the least squares problem with all available measurements via sparsity-promoting regularization. In practice, it is often the case that not all measurements are available or required for recovery. Measurements might be corrupted/missing or they arrive sequentially in streaming fashion. In this paper, we propose a global sparse recovery strategy based on subsets of measurements, named JOBS, in which multiple measurements vectors are generated from the original pool of measurements via bootstrapping, and then a joint-sparse constraint is enforced to ensure support consistency among multiple predictors. The final estimate is obtained by averaging over the $K$ predictors. The performance limits associated with different choices of number of bootstrap samples $L$ and number of estimates $K$ is analyzed theoretically. Simulation results validate some of the theoretical analysis, and show that the proposed method yields state-of-the-art recovery performance, outperforming $\ell_1$ minimization and a few other existing bootstrap-based techniques in the challenging case of low levels of measurements and is preferable over other bagging-based methods in the streaming setting since it performs better with small $K$ and $L$ for data-sets with large sizes.
Automatic Vertebra Labeling in Large-Scale 3D CT using Deep Image-to-Image Network with Message Passing and Sparsity Regularization
May 17, 2017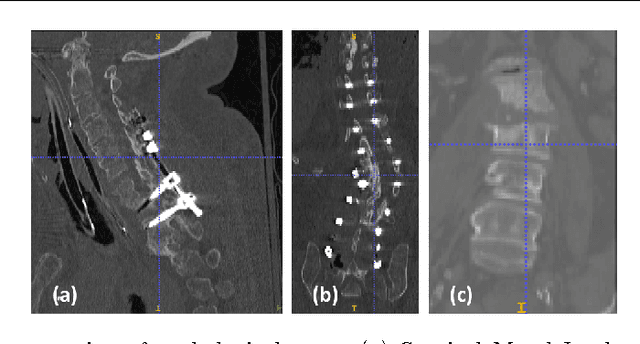
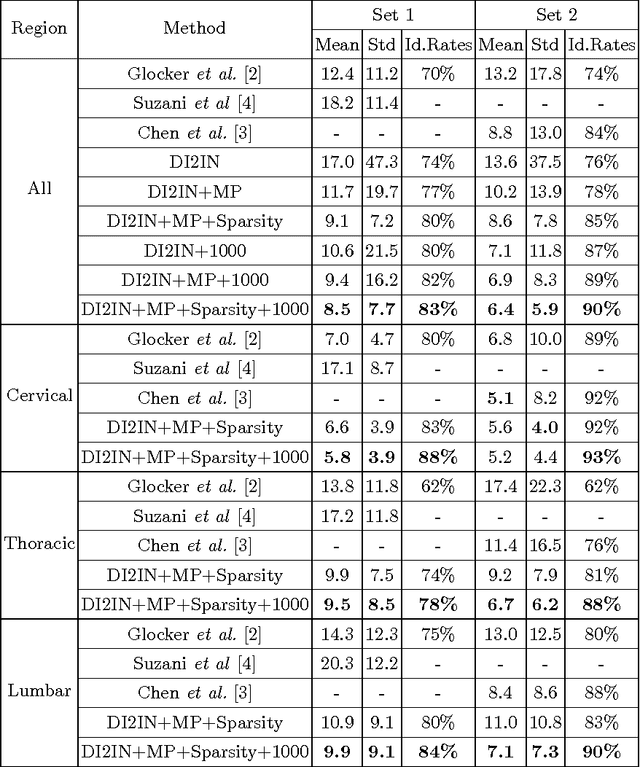

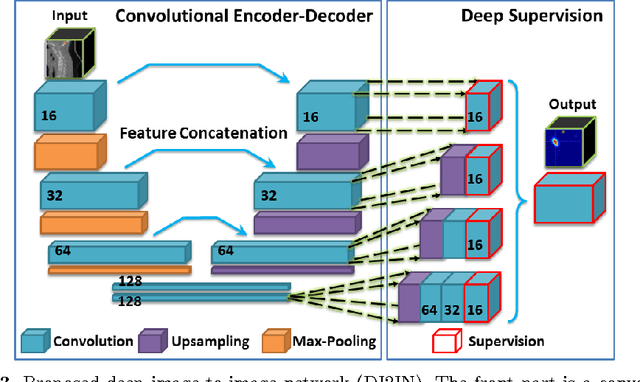
Automatic localization and labeling of vertebra in 3D medical images plays an important role in many clinical tasks, including pathological diagnosis, surgical planning and postoperative assessment. However, the unusual conditions of pathological cases, such as the abnormal spine curvature, bright visual imaging artifacts caused by metal implants, and the limited field of view, increase the difficulties of accurate localization. In this paper, we propose an automatic and fast algorithm to localize and label the vertebra centroids in 3D CT volumes. First, we deploy a deep image-to-image network (DI2IN) to initialize vertebra locations, employing the convolutional encoder-decoder architecture together with multi-level feature concatenation and deep supervision. Next, the centroid probability maps from DI2IN are iteratively evolved with the message passing schemes based on the mutual relation of vertebra centroids. Finally, the localization results are refined with sparsity regularization. The proposed method is evaluated on a public dataset of 302 spine CT volumes with various pathologies. Our method outperforms other state-of-the-art methods in terms of localization accuracy. The run time is around 3 seconds on average per case. To further boost the performance, we retrain the DI2IN on additional 1000+ 3D CT volumes from different patients. To the best of our knowledge, this is the first time more than 1000 3D CT volumes with expert annotation are adopted in experiments for the anatomic landmark detection tasks. Our experimental results show that training with such a large dataset significantly improves the performance and the overall identification rate, for the first time by our knowledge, reaches 90 %.