 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMore Than Irrational: Modeling Belief-Biased Agents
Nov 15, 2025Despite the explosive growth of AI and the technologies built upon it, predicting and inferring the sub-optimal behavior of users or human collaborators remains a critical challenge. In many cases, such behaviors are not a result of irrationality, but rather a rational decision made given inherent cognitive bounds and biased beliefs about the world. In this paper, we formally introduce a class of computational-rational (CR) user models for cognitively-bounded agents acting optimally under biased beliefs. The key novelty lies in explicitly modeling how a bounded memory process leads to a dynamically inconsistent and biased belief state and, consequently, sub-optimal sequential decision-making. We address the challenge of identifying the latent user-specific bound and inferring biased belief states from passive observations on the fly. We argue that for our formalized CR model family with an explicit and parameterized cognitive process, this challenge is tractable. To support our claim, we propose an efficient online inference method based on nested particle filtering that simultaneously tracks the user's latent belief state and estimates the unknown cognitive bound from a stream of observed actions. We validate our approach in a representative navigation task using memory decay as an example of a cognitive bound. With simulations, we show that (1) our CR model generates intuitively plausible behaviors corresponding to different levels of memory capacity, and (2) our inference method accurately and efficiently recovers the ground-truth cognitive bounds from limited observations ($\le 100$ steps). We further demonstrate how this approach provides a principled foundation for developing adaptive AI assistants, enabling adaptive assistance that accounts for the user's memory limitations.
An Interactive Framework for Finding the Optimal Trade-off in Differential Privacy
Sep 04, 2025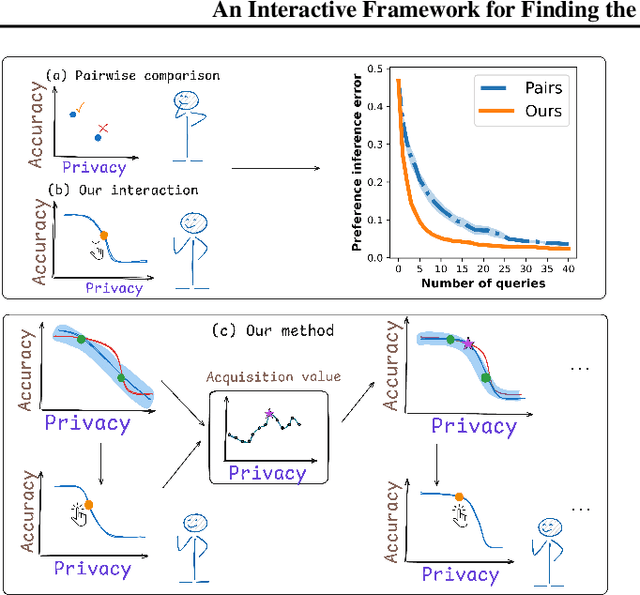
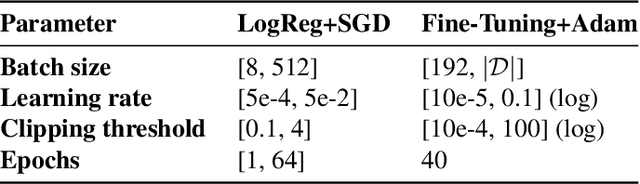
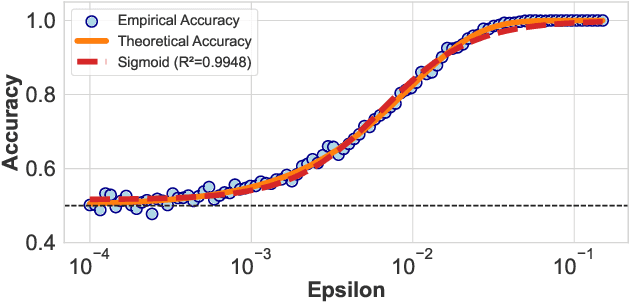
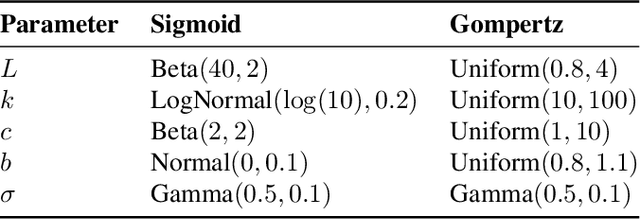
Differential privacy (DP) is the standard for privacy-preserving analysis, and introduces a fundamental trade-off between privacy guarantees and model performance. Selecting the optimal balance is a critical challenge that can be framed as a multi-objective optimization (MOO) problem where one first discovers the set of optimal trade-offs (the Pareto front) and then learns a decision-maker's preference over them. While a rich body of work on interactive MOO exists, the standard approach -- modeling the objective functions with generic surrogates and learning preferences from simple pairwise feedback -- is inefficient for DP because it fails to leverage the problem's unique structure: a point on the Pareto front can be generated directly by maximizing accuracy for a fixed privacy level. Motivated by this property, we first derive the shape of the trade-off theoretically, which allows us to model the Pareto front directly and efficiently. To address inefficiency in preference learning, we replace pairwise comparisons with a more informative interaction. In particular, we present the user with hypothetical trade-off curves and ask them to pick their preferred trade-off. Our experiments on differentially private logistic regression and deep transfer learning across six real-world datasets show that our method converges to the optimal privacy-accuracy trade-off with significantly less computational cost and user interaction than baselines.
On-Robot Bayesian Reinforcement Learning for POMDPs
Jul 22, 2023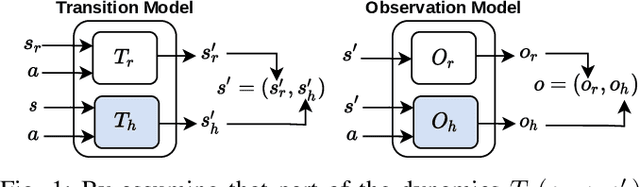
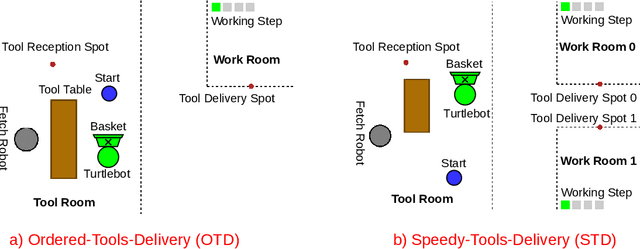
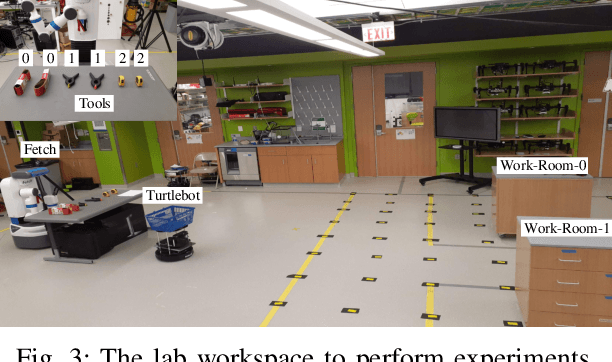
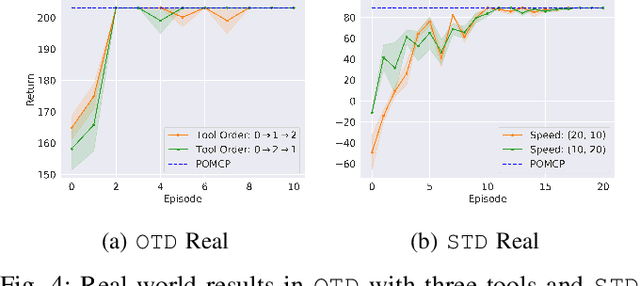
Robot learning is often difficult due to the expense of gathering data. The need for large amounts of data can, and should, be tackled with effective algorithms and leveraging expert information on robot dynamics. Bayesian reinforcement learning (BRL), thanks to its sample efficiency and ability to exploit prior knowledge, is uniquely positioned as such a solution method. Unfortunately, the application of BRL has been limited due to the difficulties of representing expert knowledge as well as solving the subsequent inference problem. This paper advances BRL for robotics by proposing a specialized framework for physical systems. In particular, we capture this knowledge in a factored representation, then demonstrate the posterior factorizes in a similar shape, and ultimately formalize the model in a Bayesian framework. We then introduce a sample-based online solution method, based on Monte-Carlo tree search and particle filtering, specialized to solve the resulting model. This approach can, for example, utilize typical low-level robot simulators and handle uncertainty over unknown dynamics of the environment. We empirically demonstrate its efficiency by performing on-robot learning in two human-robot interaction tasks with uncertainty about human behavior, achieving near-optimal performance after only a handful of real-world episodes. A video of learned policies is at https://youtu.be/H9xp60ngOes.
BADDr: Bayes-Adaptive Deep Dropout RL for POMDPs
Feb 17, 2022


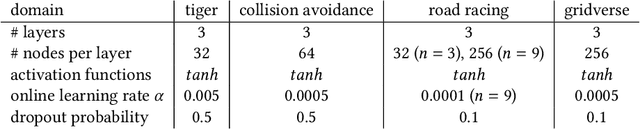
While reinforcement learning (RL) has made great advances in scalability, exploration and partial observability are still active research topics. In contrast, Bayesian RL (BRL) provides a principled answer to both state estimation and the exploration-exploitation trade-off, but struggles to scale. To tackle this challenge, BRL frameworks with various prior assumptions have been proposed, with varied success. This work presents a representation-agnostic formulation of BRL under partially observability, unifying the previous models under one theoretical umbrella. To demonstrate its practical significance we also propose a novel derivation, Bayes-Adaptive Deep Dropout rl (BADDr), based on dropout networks. Under this parameterization, in contrast to previous work, the belief over the state and dynamics is a more scalable inference problem. We choose actions through Monte-Carlo tree search and empirically show that our method is competitive with state-of-the-art BRL methods on small domains while being able to solve much larger ones.
Removing Dynamic Objects for Static Scene Reconstruction using Light Fields
Mar 24, 2020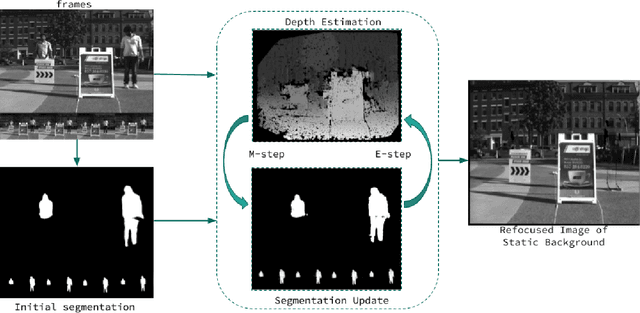
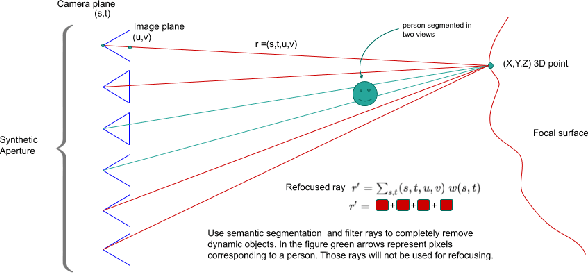
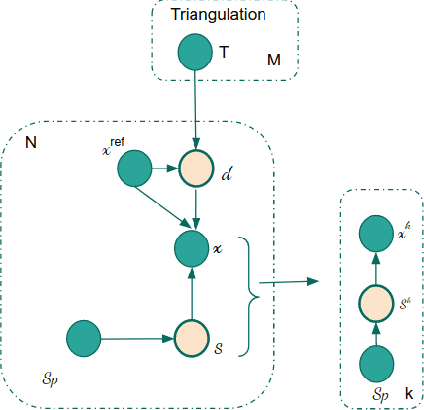
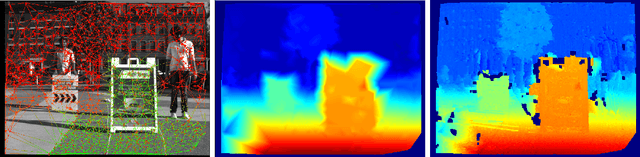
There is a general expectation that robots should operate in environments that consist of static and dynamic entities including people, furniture and automobiles. These dynamic environments pose challenges to visual simultaneous localization and mapping (SLAM) algorithms by introducing errors into the front-end. Light fields provide one possible method for addressing such problems by capturing a more complete visual information of a scene. In contrast to a single ray from a perspective camera, Light Fields capture a bundle of light rays emerging from a single point in space, allowing us to see through dynamic objects by refocusing past them. In this paper we present a method to synthesize a refocused image of the static background in the presence of dynamic objects that uses a light-field acquired with a linear camera array. We simultaneously estimate both the depth and the refocused image of the static scene using semantic segmentation for detecting dynamic objects in a single time step. This eliminates the need for initializing a static map . The algorithm is parallelizable and is implemented on GPU allowing us execute it at close to real time speeds. We demonstrate the effectiveness of our method on real-world data acquired using a small robot with a five camera array.
Bayesian Reinforcement Learning in Factored POMDPs
Nov 14, 2018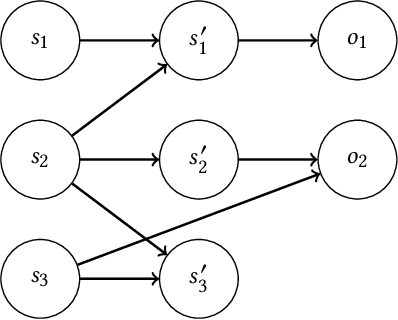

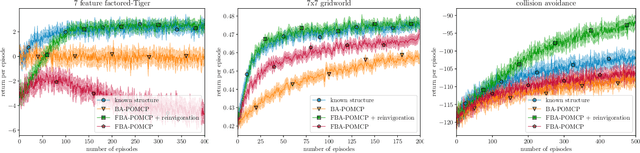

Bayesian approaches provide a principled solution to the exploration-exploitation trade-off in Reinforcement Learning. Typical approaches, however, either assume a fully observable environment or scale poorly. This work introduces the Factored Bayes-Adaptive POMDP model, a framework that is able to exploit the underlying structure while learning the dynamics in partially observable systems. We also present a belief tracking method to approximate the joint posterior over state and model variables, and an adaptation of the Monte-Carlo Tree Search solution method, which together are capable of solving the underlying problem near-optimally. Our method is able to learn efficiently given a known factorization or also learn the factorization and the model parameters at the same time. We demonstrate that this approach is able to outperform current methods and tackle problems that were previously infeasible.
Learning in POMDPs with Monte Carlo Tree Search
Jun 14, 2018
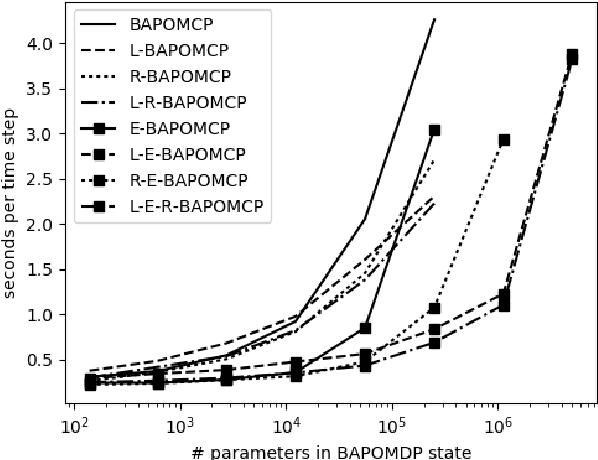
The POMDP is a powerful framework for reasoning under outcome and information uncertainty, but constructing an accurate POMDP model is difficult. Bayes-Adaptive Partially Observable Markov Decision Processes (BA-POMDPs) extend POMDPs to allow the model to be learned during execution. BA-POMDPs are a Bayesian RL approach that, in principle, allows for an optimal trade-off between exploitation and exploration. Unfortunately, BA-POMDPs are currently impractical to solve for any non-trivial domain. In this paper, we extend the Monte-Carlo Tree Search method POMCP to BA-POMDPs and show that the resulting method, which we call BA-POMCP, is able to tackle problems that previous solution methods have been unable to solve. Additionally, we introduce several techniques that exploit the BA-POMDP structure to improve the efficiency of BA-POMCP along with proof of their convergence.