 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTiPToP: A Modular Open-Vocabulary Planning System for Robotic Manipulation
Mar 10, 2026We present TiPToP, an extensible modular system that combines pretrained vision foundation models with an existing Task and Motion Planner (TAMP) to solve multi-step manipulation tasks directly from input RGB images and natural-language instructions. Our system aims to be simple and easy-to-use: it can be installed and run on a standard DROID setup in under one hour and adapted to new embodiments with minimal effort. We evaluate TiPToP -- which requires zero robot data -- over 28 tabletop manipulation tasks in simulation and the real world and find it matches or outperforms $π_{0.5}\text{-DROID}$, a vision-language-action (VLA) model fine-tuned on 350 hours of embodiment-specific demonstrations. TiPToP's modular architecture enables us to analyze the system's failure modes at the component level. We analyze results from an evaluation of 173 trials and identify directions for improvement. We release TiPToP open-source to further research on modular manipulation systems and tighter integration between learning and planning. Project website and code: https://tiptop-robot.github.io
Bi-Level Belief Space Search for Compliant Part Mating Under Uncertainty
Sep 24, 2024



The problem of mating two parts with low clearance remains difficult for autonomous robots. We present bi-level belief assembly (BILBA), a model-based planner that computes a sequence of compliant motions which can leverage contact with the environment to reduce uncertainty and perform challenging assembly tasks with low clearance. Our approach is based on first deriving candidate contact schedules from the structure of the configuration space obstacle of the parts and then finding compliant motions that achieve the desired contacts. We demonstrate that BILBA can efficiently compute robust plans on multiple simulated tasks as well as a real robot rectangular peg-in-hole insertion task.
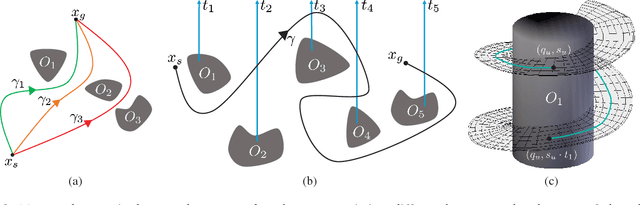
Online Motion Planning Over Multiple Homotopy Classes with Gaussian Process Inference
Aug 01, 2019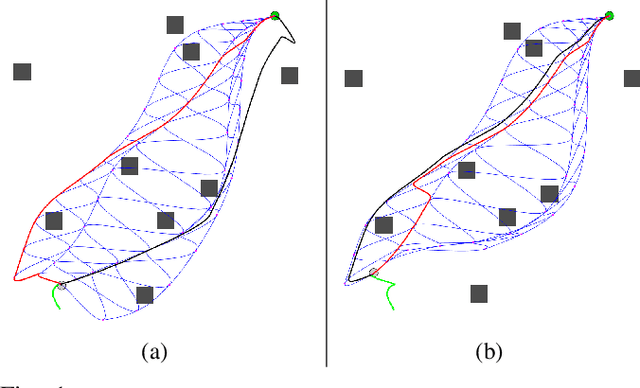
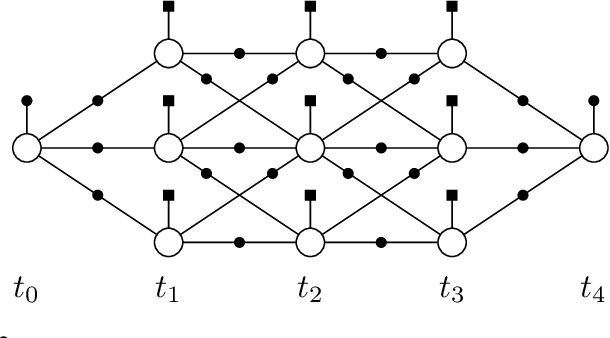
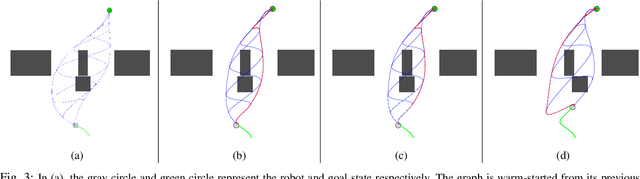
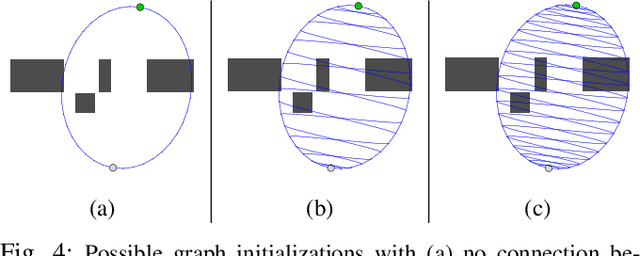
Efficient planning in dynamic and uncertain environments is a fundamental challenge in robotics. In the context of trajectory optimization, the feasibility of paths can change as the environment evolves. Therefore, it can be beneficial to reason about multiple possible paths simultaneously. We build on prior work that considers graph-based trajectories to find solutions in multiple homotopy classes concurrently. Specifically, we extend this previous work to an online setting where the unreachable (in time) part of the graph is pruned and the remaining graph is reoptimized at every time step. As the robot moves within the graph on the path that is most promising, the pruning and reoptimization allows us to retain candidate paths that may become more viable in the future as the environment changes, essentially enabling the robot to dynamically switch between numerous homotopy classes. We compare our approach against prior work without the homotopy switching capability and show improved performance across several metrics in simulation with a 2D robot in multiple dynamic environments under noisy measurements and execution.
Effective Footstep Planning Using Homotopy-Class Guidance
Apr 10, 2019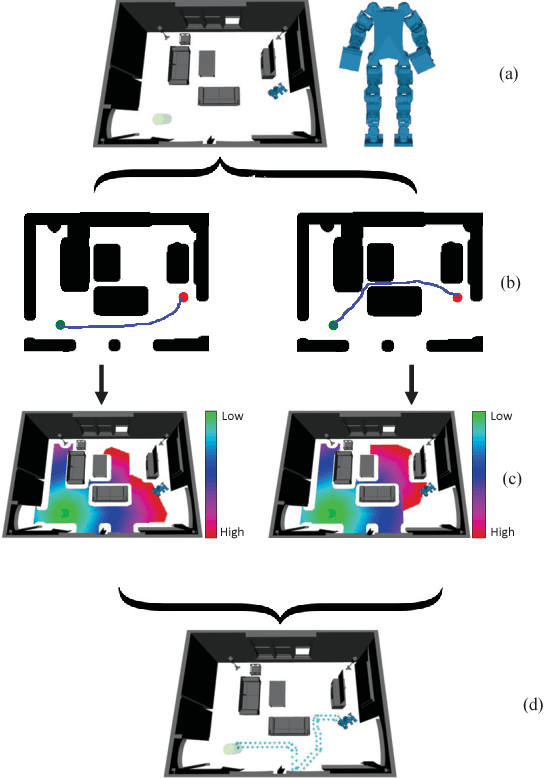
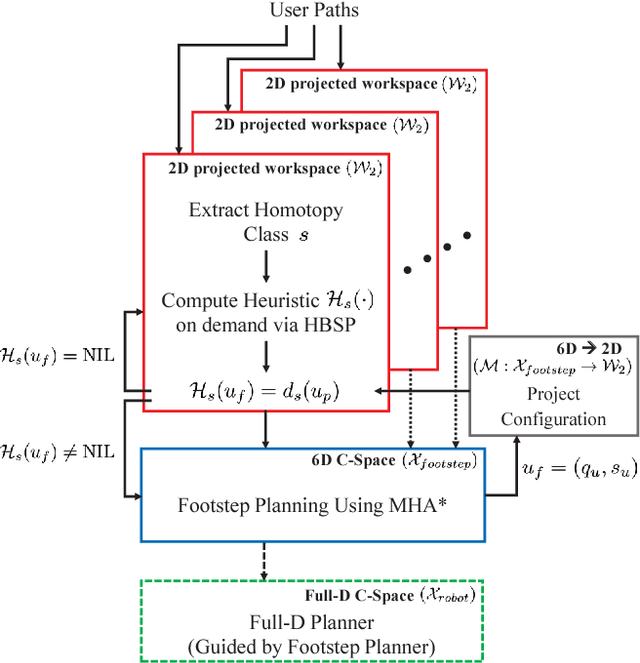
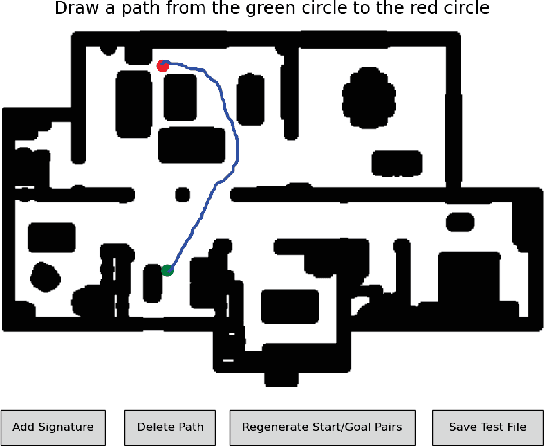
Planning the motion for humanoid robots is a computationally-complex task due to the high dimensionality of the system. Thus, a common approach is to first plan in the low-dimensional space induced by the robot's feet---a task referred to as footstep planning. This low-dimensional plan is then used to guide the full motion of the robot. One approach that has proven successful in footstep planning is using search-based planners such as A* and its many variants. To do so, these search-based planners have to be endowed with effective heuristics to efficiently guide them through the search space. However, designing effective heuristics is a time-consuming task that requires the user to have good domain knowledge. Thus, our goal is to be able to effectively plan the footstep motions taken by a humanoid robot while obviating the burden on the user to carefully design local-minima free heuristics. To this end, we propose to use user-defined homotopy classes in the workspace that are intuitive to define. These homotopy classes are used to automatically generate heuristic functions that efficiently guide the footstep planner. Additionally, we present an extension to homotopy classes such that they are applicable to complex multi-level environments. We compare our approach for footstep planning with a standard approach that uses a heuristic common to footstep planning. In simple scenarios, the performance of both algorithms is comparable. However, in more complex scenarios our approach allows for a speedup in planning of several orders of magnitude when compared to the standard approach.