 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Motion Planning Over Multiple Homotopy Classes with Gaussian Process Inference
Paper and Code
Aug 01, 2019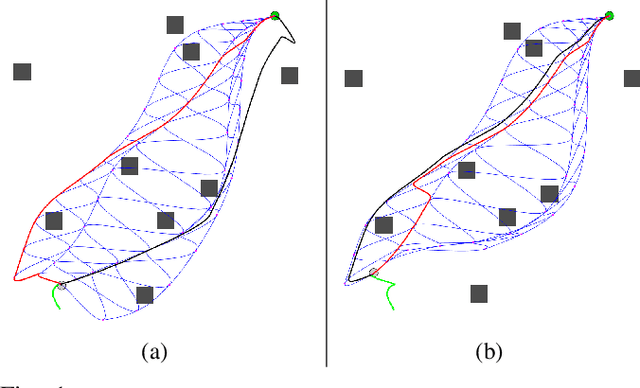
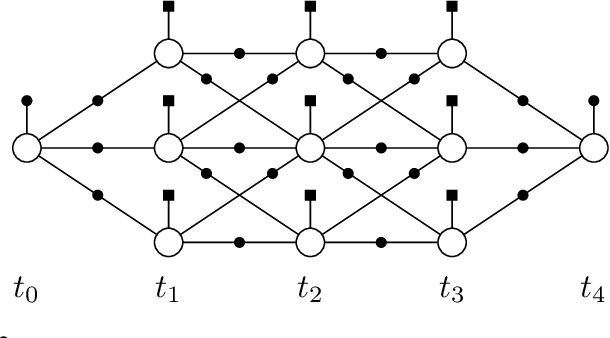
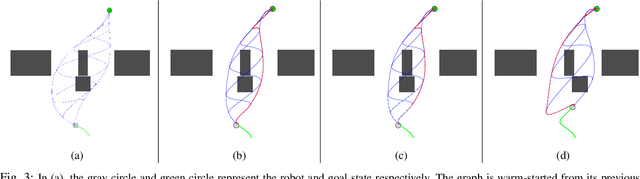
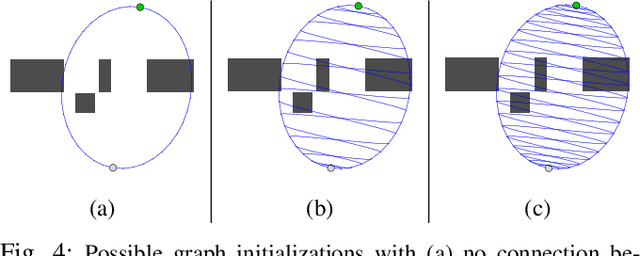
Efficient planning in dynamic and uncertain environments is a fundamental challenge in robotics. In the context of trajectory optimization, the feasibility of paths can change as the environment evolves. Therefore, it can be beneficial to reason about multiple possible paths simultaneously. We build on prior work that considers graph-based trajectories to find solutions in multiple homotopy classes concurrently. Specifically, we extend this previous work to an online setting where the unreachable (in time) part of the graph is pruned and the remaining graph is reoptimized at every time step. As the robot moves within the graph on the path that is most promising, the pruning and reoptimization allows us to retain candidate paths that may become more viable in the future as the environment changes, essentially enabling the robot to dynamically switch between numerous homotopy classes. We compare our approach against prior work without the homotopy switching capability and show improved performance across several metrics in simulation with a 2D robot in multiple dynamic environments under noisy measurements and execution.