 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompliance error compensation in robotic-based milling
Sep 22, 2014


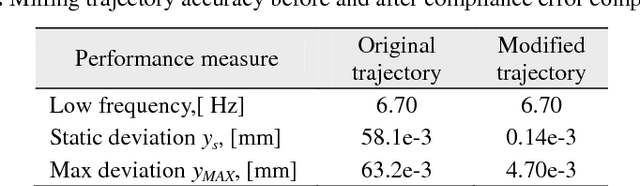
The paper deals with the problem of compliance errors compensation in robotic-based milling. Contrary to previous works that assume that the forces/torques generated by the manufacturing process are constant, the interaction between the milling tool and the workpiece is modeled in details. It takes into account the tool geometry, the number of teeth, the feed rate, the spindle rotation speed and the properties of the material to be processed. Due to high level of the disturbing forces/torques, the developed compensation technique is based on the non-linear stiffness model that allows us to modify the target trajectory taking into account nonlinearities and to avoid the chattering effect. Illustrative example is presented that deals with robotic-based milling of aluminum alloy.
Solution regions in the parameter space of a 3-RRR decoupled robot for a prescribed workspace
Apr 12, 2012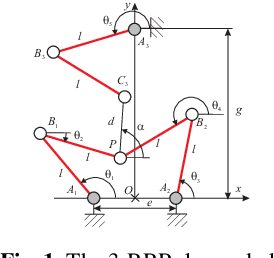
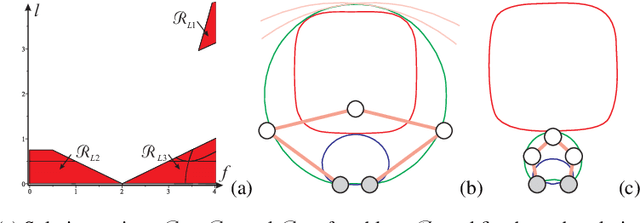

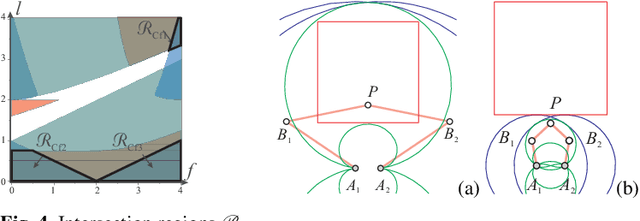
This paper proposes a new design method to determine the feasible set of parameters of translational or position/orientation decoupled parallel robots for a prescribed singularity-free workspace of regular shape. The suggested method uses Groebner bases to define the singularities and the cylindrical algebraic decomposition to characterize the set of parameters. It makes it possible to generate all the robot designs. A 3-RRR decoupled robot is used to validate the proposed design method.
Performance evaluation of parallel manipulators for milling application
Dec 09, 2010



This paper focuses on the performance evaluation of the parallel manipulators for milling of composite materials. For this application the most significant performance measurements, which denote the ability of the manipulator for the machining are defined. In this case, optimal synthesis task is solved as a multicriterion optimization problem with respect to the geometric, kinematic, kinetostatic, elastostostatic, dynamic properties. It is shown that stiffness is an important performance factor. Previous models operate with links approximation and calculate stiffness matrix in the neighborhood of initial point. This is a reason why a new way for stiffness matrix calculation is proposed. This method is illustrated in a concrete industrial problem.
On the optimal design of parallel robots taking into account their deformations and natural frequencies
Sep 01, 2009



This paper discusses the utility of using simple stiffness and vibrations models, based on the Jacobian matrix of a manipulator and only the rigidity of the actuators, whenever its geometry is optimised. In many works, these simplified models are used to propose optimal design of robots. However, the elasticity of the drive system is often negligible in comparison with the elasticity of the elements, especially in applications where high dynamic performances are needed. Therefore, the use of such a simplified model may lead to the creation of robots with long legs, which will be submitted to large bending and twisting deformations. This paper presents an example of manipulator for which it is preferable to use a complete stiffness or vibration model to obtain the most suitable design and shows that the use of simplified models can lead to mechanisms with poorer rigidity.
Changing Assembly Modes without Passing Parallel Singularities in Non-Cuspidal 3-R\underline{P}R Planar Parallel Robots
Sep 19, 2008


This paper demonstrates that any general 3-DOF three-legged planar parallel robot with extensible legs can change assembly modes without passing through parallel singularities (configurations where the mobile platform loses its stiffness). While the results are purely theoretical, this paper questions the very definition of parallel singularities.
Self-Motions of General 3-RPR Planar Parallel Robots
Aug 08, 2008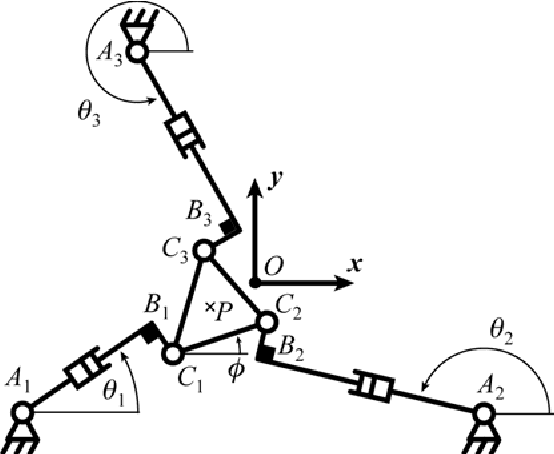


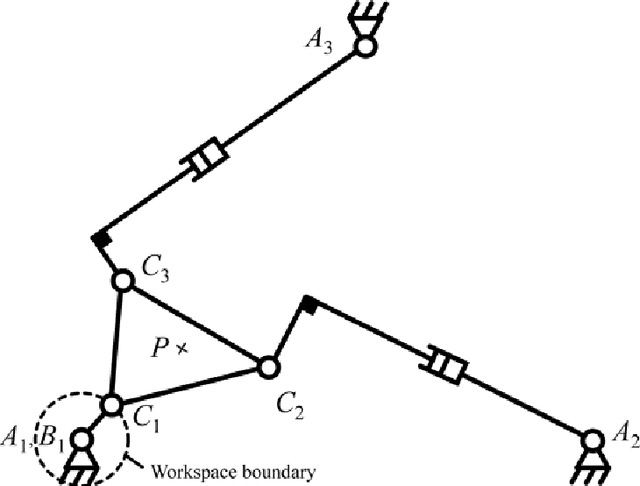
This paper studies the kinematic geometry of general 3-RPR planar parallel robots with actuated base joints. These robots, while largely overlooked, have simple direct kinematics and large singularity-free workspace. Furthermore, their kinematic geometry is the same as that of a newly developed parallel robot with SCARA-type motions. Starting from the direct and inverse kinematic model, the expressions for the singularity loci of 3-RPR planar parallel robots are determined. Then, the global behaviour at all singularities is geometrically described by studying the degeneracy of the direct kinematic model. Special cases of self-motions are then examined and the degree of freedom gained in such special configurations is kinematically interpreted. Finally, a practical example is discussed and experimental validations performed on an actual robot prototype are presented.