 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChanging Assembly Modes without Passing Parallel Singularities in Non-Cuspidal 3-R\underline{P}R Planar Parallel Robots
Sep 19, 2008


This paper demonstrates that any general 3-DOF three-legged planar parallel robot with extensible legs can change assembly modes without passing through parallel singularities (configurations where the mobile platform loses its stiffness). While the results are purely theoretical, this paper questions the very definition of parallel singularities.
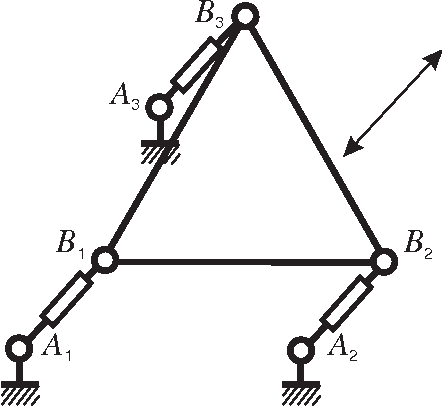
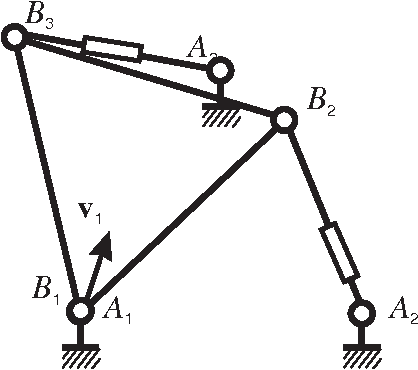
Self-Motions of General 3-RPR Planar Parallel Robots
Aug 08, 2008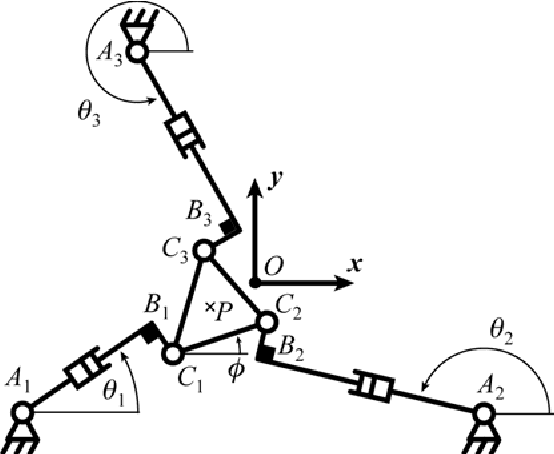


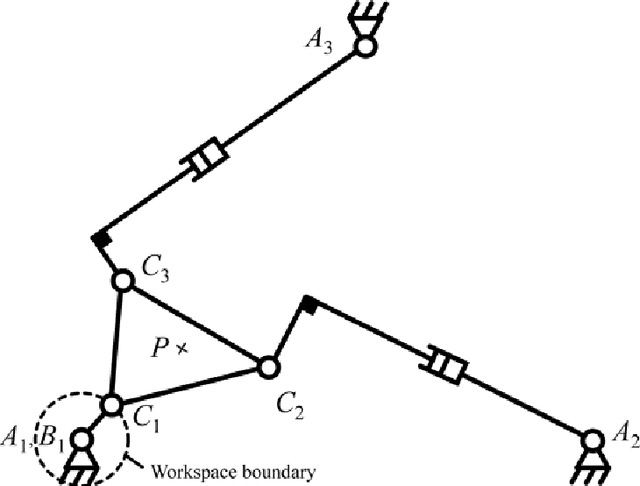
This paper studies the kinematic geometry of general 3-RPR planar parallel robots with actuated base joints. These robots, while largely overlooked, have simple direct kinematics and large singularity-free workspace. Furthermore, their kinematic geometry is the same as that of a newly developed parallel robot with SCARA-type motions. Starting from the direct and inverse kinematic model, the expressions for the singularity loci of 3-RPR planar parallel robots are determined. Then, the global behaviour at all singularities is geometrically described by studying the degeneracy of the direct kinematic model. Special cases of self-motions are then examined and the degree of freedom gained in such special configurations is kinematically interpreted. Finally, a practical example is discussed and experimental validations performed on an actual robot prototype are presented.
Working and Assembly Modes of the Agile Eye
Aug 29, 2007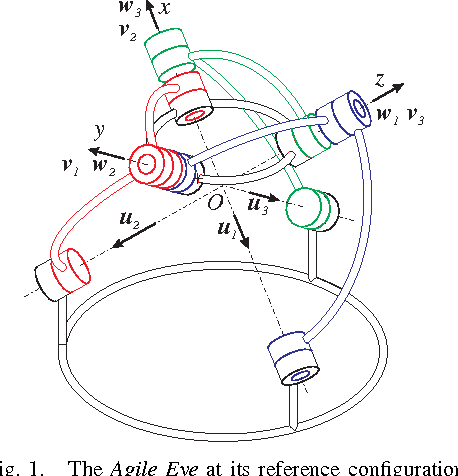
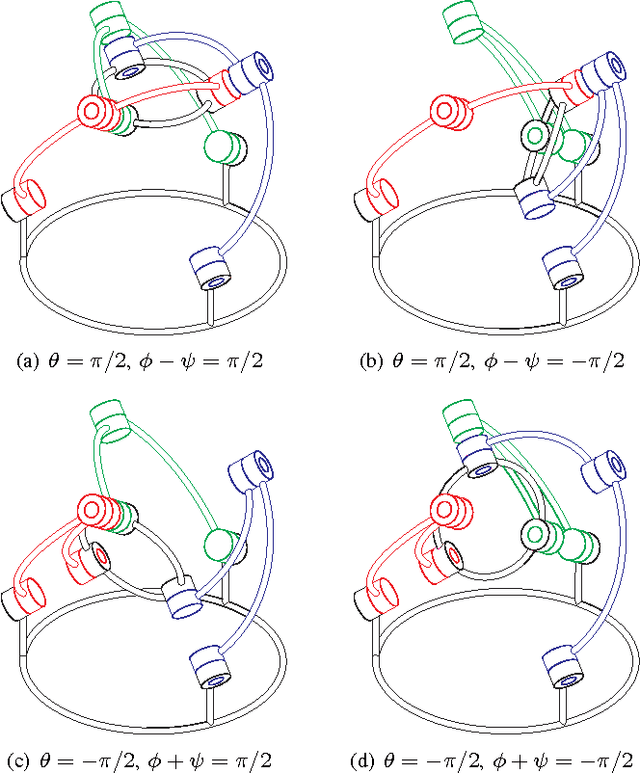
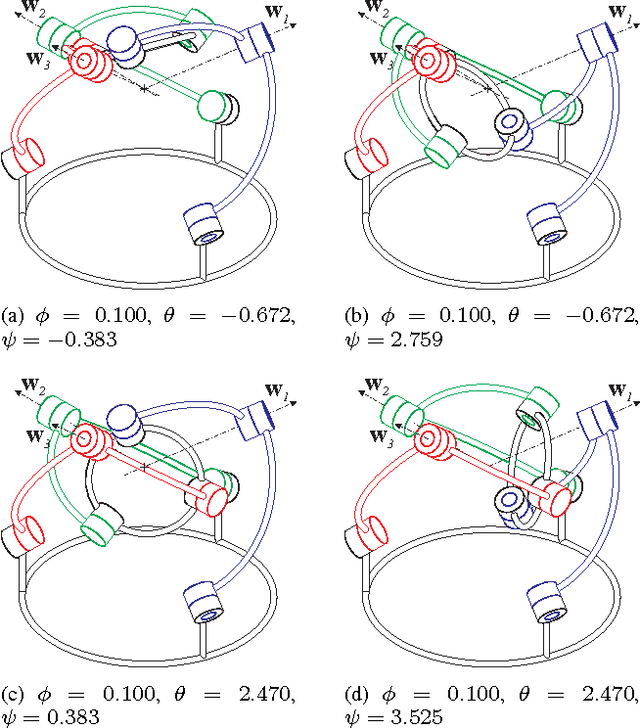
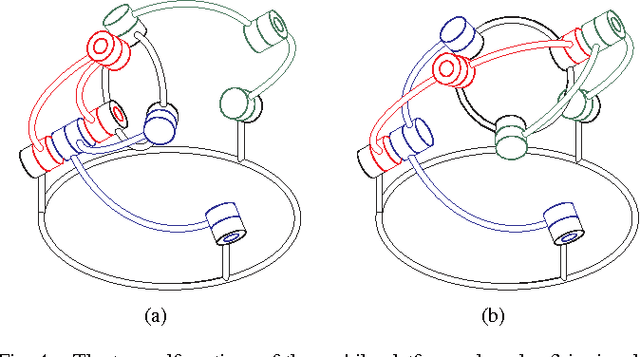
This paper deals with the in-depth kinematic analysis of a special spherical parallel wrist, called the Agile Eye. The Agile Eye is a three-legged spherical parallel robot with revolute joints in which all pairs of adjacent joint axes are orthogonal. Its most peculiar feature, demonstrated in this paper for the first time, is that its (orientation) workspace is unlimited and flawed only by six singularity curves (rather than surfaces). Furthermore, these curves correspond to self-motions of the mobile platform. This paper also demonstrates that, unlike for any other such complex spatial robots, the four solutions to the direct kinematics of the Agile Eye (assembly modes) have a simple geometric relationship with the eight solutions to the inverse kinematics (working modes).
Kinematic analysis of the 3-RPR parallel manipulator
Aug 29, 2007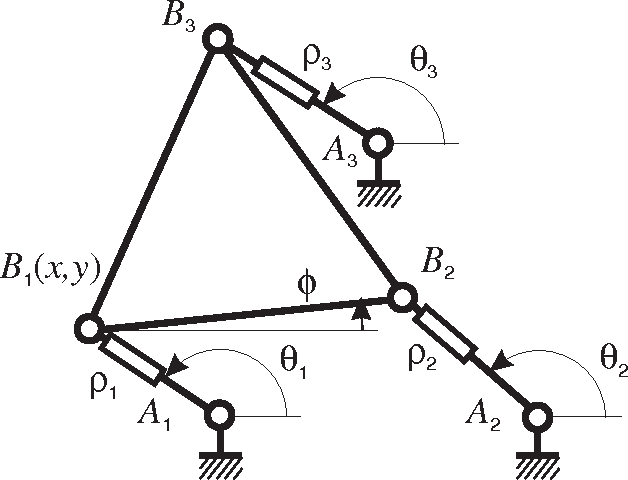
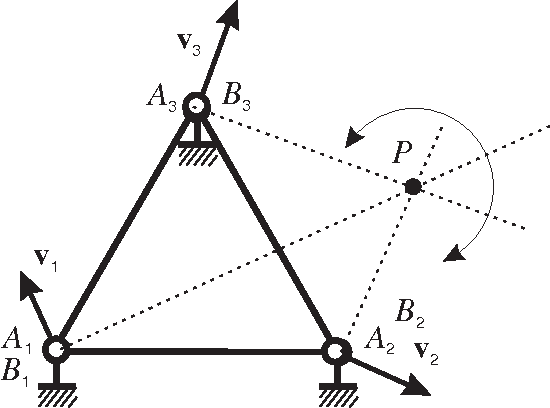
The aim of this paper is the kinematic study of a 3-RPR planar parallel manipulator where the three fixed revolute joints are actuated. The direct and inverse kinematic problem as well as the singular configuration is characterized. On parallel singular configurations, the motion produce by the mobile platform can be compared to the Reuleaux straight-line mechanism.