 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShaking Force Balancing of the Orthoglide
Nov 13, 2020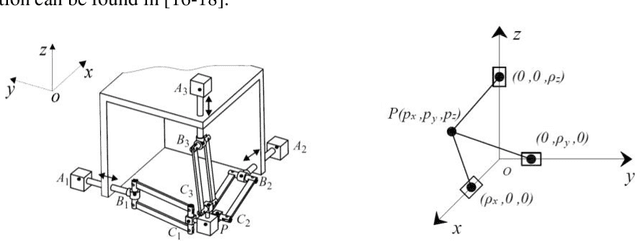
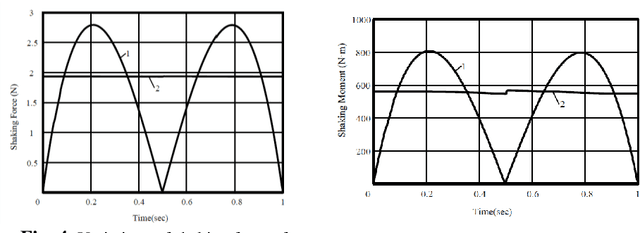

The shaking force balancing is a well-known problem in the design of high-speed robotic systems because the variable dynamic loads cause noises, wear and fatigue of mechanical structures. Different solutions, for full or partial shaking force balancing, via internal mass redistribution or by adding auxiliary links were developed. The paper deals with the shaking force balancing of the Orthoglide. The suggested solution based on the optimal acceleration control of the manipulator's common center of mass allows a significant reduction of the shaking force. Compared with the balancing method via adding counterweights or auxiliary substructures, the proposed method can avoid some drawbacks: the increase of the total mass, the overall size and the complexity of the mechanism, which become especially challenging for special parallel manipulators. Using the proposed motion control method, the maximal value of the total mass center acceleration is reduced, as a consequence, the shaking force of the manipulator decreases. The efficiency of the suggested method via numerical simulations carried out with ADAMS is demonstrated.
Key Features of the Coupled Hand-operated Balanced Manipulator and Lightweight Robot
Aug 07, 2019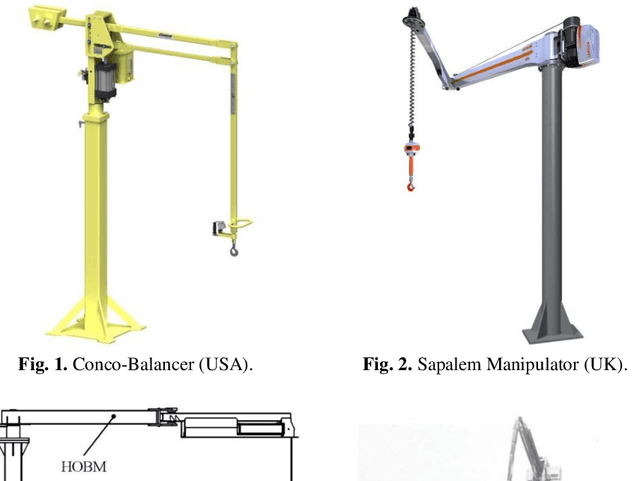


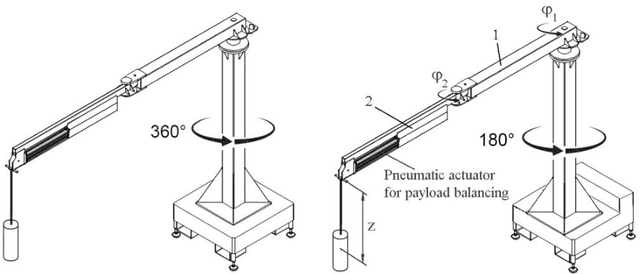
The paper deals with coupled systems including hand-operated balanced manipulators and lightweight robots. The aim of such a cooperation is to displace heavy payloads with less powerful robots. In other term, in the coupled system for handling of heavy payloads by a HOBM an operator is replaced by a LWR. The advantages of the coupled HOBM and LWR are disclosed and the optimal design of the cooperative workspace is discussed. Behavior of the coupled system in a static mode when the velocities the HOBM are limited does not present any special problems. In this mode, the inertial forces are significantly lower than the gravitational one. The payload is completely balanced by the HOBM and the LWR assumes the prescribed displacements with low load. However, in a dynamic mode, the HOBM with massive links creates additional loads on the LWR, which can be significant. The present study considers a method for determination of inertia effects of the HOBM on the LWR. The given numerical simulations show the significant increasing of the input torques due to the inertia forces of the HOBM. Behavior of the HOBM with cable lift and the LWR is also examined.
Solution regions in the parameter space of a 3-RRR decoupled robot for a prescribed workspace
Apr 12, 2012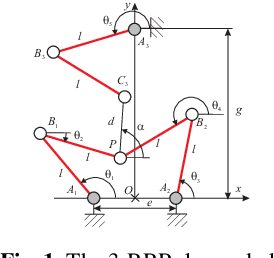

This paper proposes a new design method to determine the feasible set of parameters of translational or position/orientation decoupled parallel robots for a prescribed singularity-free workspace of regular shape. The suggested method uses Groebner bases to define the singularities and the cylindrical algebraic decomposition to characterize the set of parameters. It makes it possible to generate all the robot designs. A 3-RRR decoupled robot is used to validate the proposed design method.
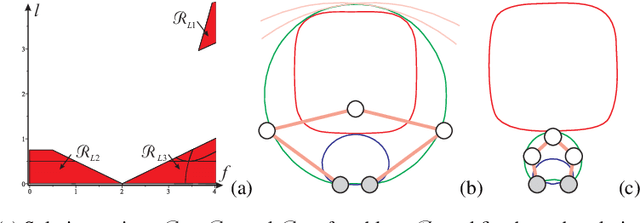
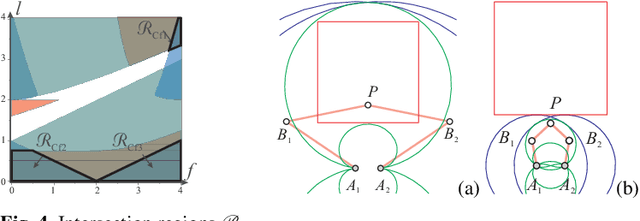
Self-Motions of General 3-RPR Planar Parallel Robots
Aug 08, 2008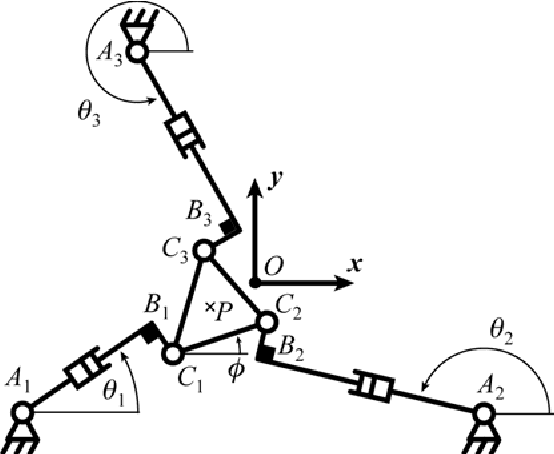


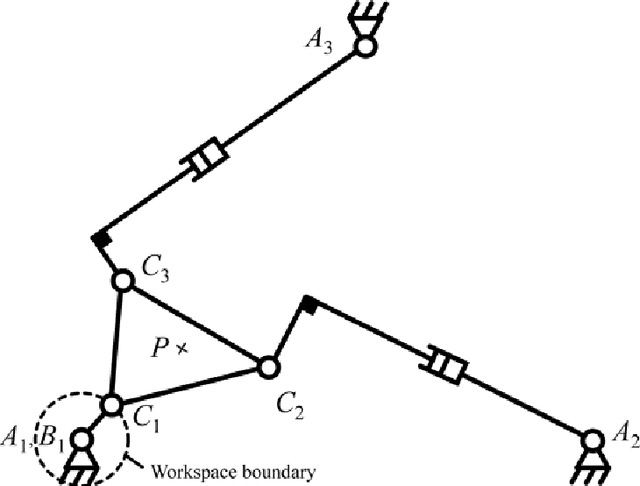
This paper studies the kinematic geometry of general 3-RPR planar parallel robots with actuated base joints. These robots, while largely overlooked, have simple direct kinematics and large singularity-free workspace. Furthermore, their kinematic geometry is the same as that of a newly developed parallel robot with SCARA-type motions. Starting from the direct and inverse kinematic model, the expressions for the singularity loci of 3-RPR planar parallel robots are determined. Then, the global behaviour at all singularities is geometrically described by studying the degeneracy of the direct kinematic model. Special cases of self-motions are then examined and the degree of freedom gained in such special configurations is kinematically interpreted. Finally, a practical example is discussed and experimental validations performed on an actual robot prototype are presented.