 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKey Features of the Coupled Hand-operated Balanced Manipulator and Lightweight Robot
Aug 07, 2019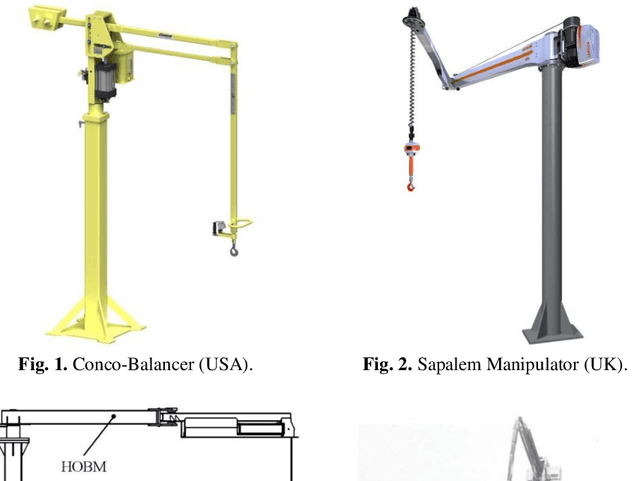


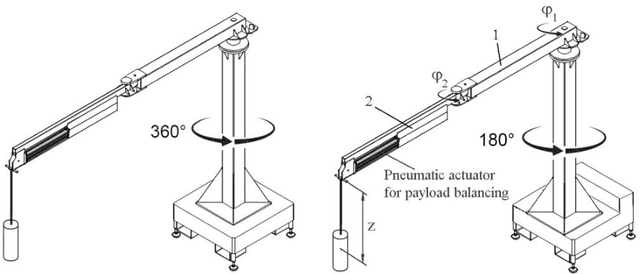
The paper deals with coupled systems including hand-operated balanced manipulators and lightweight robots. The aim of such a cooperation is to displace heavy payloads with less powerful robots. In other term, in the coupled system for handling of heavy payloads by a HOBM an operator is replaced by a LWR. The advantages of the coupled HOBM and LWR are disclosed and the optimal design of the cooperative workspace is discussed. Behavior of the coupled system in a static mode when the velocities the HOBM are limited does not present any special problems. In this mode, the inertial forces are significantly lower than the gravitational one. The payload is completely balanced by the HOBM and the LWR assumes the prescribed displacements with low load. However, in a dynamic mode, the HOBM with massive links creates additional loads on the LWR, which can be significant. The present study considers a method for determination of inertia effects of the HOBM on the LWR. The given numerical simulations show the significant increasing of the input torques due to the inertia forces of the HOBM. Behavior of the HOBM with cable lift and the LWR is also examined.