 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompensation of compliance errors in parallel manipulators composed of non-perfect kinematic chains
Apr 08, 2012



The paper is devoted to the compliance errors compensation for parallel manipulators under external loading. Proposed approach is based on the non-linear stiffness modeling and reduces to a proper adjusting of a target trajectory. In contrast to previous works, in addition to compliance errors caused by machining forces, the problem of assembling errors caused by inaccuracy in the kinematic chains is considered. The advantages and practical significance of the proposed approach are illustrated by examples that deal with groove milling with Orthoglide manipulator.
Stiffness matrix of manipulators with passive joints: computational aspects
Feb 15, 2012



The paper focuses on stiffness matrix computation for manipulators with passive joints, compliant actuators and flexible links. It proposes both explicit analytical expressions and an efficient recursive procedure that are applicable in the general case and allow obtaining the desired matrix either in analytical or numerical form. Advantages of the developed technique and its ability to produce both singular and non-singular stiffness matrices are illustrated by application examples that deal with stiffness modeling of two Stewart-Gough platforms.
* arXiv admin note: substantial text overlap with arXiv:1107.4496
Cartesian stiffness matrix of manipulators with passive joints: analytical approach
Jul 22, 2011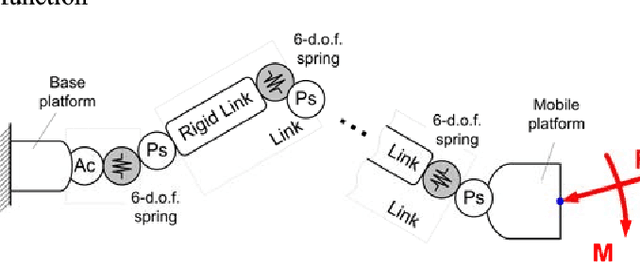
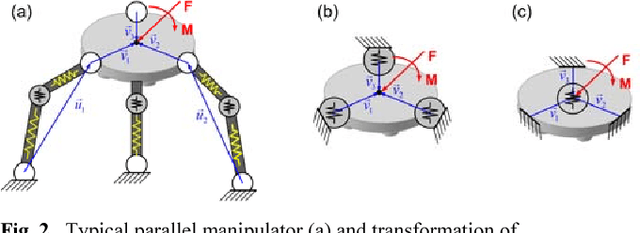
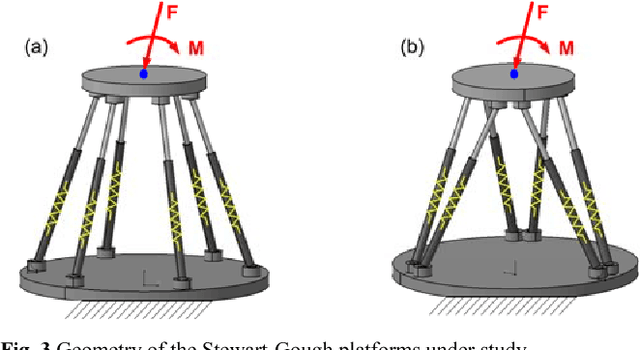
The paper focuses on stiffness matrix computation for manipulators with passive joints. It proposes both explicit analytical expressions and an efficient recursive procedure that are applicable in general case and allow obtaining the desired matrix either in analytical or numerical form. Advantages of the developed technique and its ability to produce both singular and non-singular stiffness matrices are illustrated by application examples that deal with stiffness modeling of two Stewart-Gough platforms.
Enhanced stiffness modeling of manipulators with passive joints
Apr 05, 2011



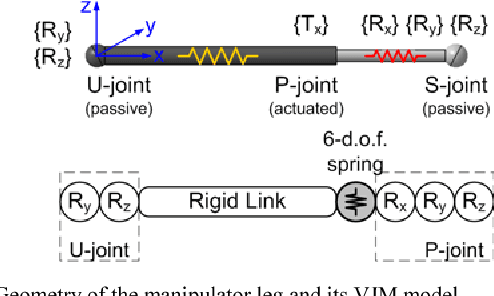
The paper presents a methodology to enhance the stiffness analysis of serial and parallel manipulators with passive joints. It directly takes into account the loading influence on the manipulator configuration and, consequently, on its Jacobians and Hessians. The main contributions of this paper are the introduction of a non-linear stiffness model for the manipulators with passive joints, a relevant numerical technique for its linearization and computing of the Cartesian stiffness matrix which allows rank-deficiency. Within the developed technique, the manipulator elements are presented as pseudo-rigid bodies separated by multidimensional virtual springs and perfect passive joints. Simulation examples are presented that deal with parallel manipulators of the Ortholide family and demonstrate the ability of the developed methodology to describe non-linear behavior of the manipulator structure such as a sudden change of the elastic instability properties (buckling).
Stiffness modelling of parallelogram-based parallel manipulators
Dec 10, 2010



The paper presents a methodology to enhance the stiffness analysis of parallel manipulators with parallelogram-based linkage. It directly takes into account the influence of the external loading and allows computing both the non-linear ``load-deflection" relation and relevant rank-deficient stiffness matrix. An equivalent bar-type pseudo-rigid model is also proposed to describe the parallelogram stiffness by means of five mutually coupled virtual springs. The contributions of this paper are highlighted with a parallelogram-type linkage used in a manipulator from the Orthoglide family.
Performance evaluation of parallel manipulators for milling application
Dec 09, 2010



This paper focuses on the performance evaluation of the parallel manipulators for milling of composite materials. For this application the most significant performance measurements, which denote the ability of the manipulator for the machining are defined. In this case, optimal synthesis task is solved as a multicriterion optimization problem with respect to the geometric, kinematic, kinetostatic, elastostostatic, dynamic properties. It is shown that stiffness is an important performance factor. Previous models operate with links approximation and calculate stiffness matrix in the neighborhood of initial point. This is a reason why a new way for stiffness matrix calculation is proposed. This method is illustrated in a concrete industrial problem.
Stiffness Analysis of Parallel Manipulators with Preloaded Passive Joints
Dec 09, 2010



The paper presents a methodology for the enhanced stiffness analysis of parallel manipulators with internal preloading in passive joints. It also takes into account influence of the external loading and allows computing both the non-linear "load-deflection" relation and the stiffness matrices for any given location of the end-platform or actuating drives. Using this methodology, it is proposed the kinetostatic control algorithm that allows to improve accuracy of the classical kinematic control and to compensate position errors caused by elastic deformations in links/joints due to the external/internal loading. The results are illustrated by an example that deals with a parallel manipulator of the Orthoglide family where the internal preloading allows to eliminate the undesired buckling phenomena and to improve the stiffness in the neighborhood of its kinematic singularities.
Nonlinear Effects in Stiffness Modeling of Robotic Manipulators
Dec 08, 2009



The paper focuses on the enhanced stiffness modeling of robotic manipulators by taking into account influence of the external force/torque acting upon the end point. It implements the virtual joint technique that describes the compliance of manipulator elements by a set of localized six-dimensional springs separated by rigid links and perfect joints. In contrast to the conventional formulation, which is valid for the unloaded mode and small displacements, the proposed approach implicitly assumes that the loading leads to the non-negligible changes of the manipulator posture and corresponding amendment of the Jacobian. The developed numerical technique allows computing the static equilibrium and relevant force/torque reaction of the manipulator for any given displacement of the end-effector. This enables designer detecting essentially nonlinear effects in elastic behavior of manipulator, similar to the buckling of beam elements. It is also proposed the linearization procedure that is based on the inversion of the dedicated matrix composed of the stiffness parameters of the virtual springs and the Jacobians/Hessians of the active and passive joints. The developed technique is illustrated by an application example that deals with the stiffness analysis of a parallel manipulator of the Orthoglide family.
* ISSN 2070-3724
Calibration of 3-d.o.f. Translational Parallel Manipulators Using Leg Observations
Oct 30, 2009



The paper proposes a novel approach for the geometrical model calibration of quasi-isotropic parallel kinematic mechanisms of the Orthoglide family. It is based on the observations of the manipulator leg parallelism during motions between the specific test postures and employs a low-cost measuring system composed of standard comparator indicators attached to the universal magnetic stands. They are sequentially used for measuring the deviation of the relevant leg location while the manipulator moves the TCP along the Cartesian axes. Using the measured differences, the developed algorithm estimates the joint offsets and the leg lengths that are treated as the most essential parameters. Validity of the proposed calibration technique is confirmed by the experimental results.
* ISBN: 978-3-902613-20-2
Stiffness Analysis Of Multi-Chain Parallel Robotic Systems
Sep 22, 2009



The paper presents a new stiffness modelling method for multi-chain parallel robotic manipulators with flexible links and compliant actuating joints. In contrast to other works, the method involves a FEA-based link stiffness evaluation and employs a new solution strategy of the kinetostatic equations, which allows computing the stiffness matrix for singular postures and to take into account influence of the external forces. The advantages of the developed technique are confirmed by application examples, which deal with stiffness analysis of a parallel manipulator of the Orthoglide family