 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSyncTwin: Fast Digital Twin Construction and Synchronization for Safe Robotic Grasping
Jan 14, 2026Accurate and safe grasping under dynamic and visually occluded conditions remains a core challenge in real-world robotic manipulation. We present SyncTwin, a digital twin framework that unifies fast 3D scene reconstruction and real-to-sim synchronization for robust and safety-aware grasping in such environments. In the offline stage, we employ VGGT to rapidly reconstruct object-level 3D assets from RGB images, forming a reusable geometry library for simulation. During execution, SyncTwin continuously synchronizes the digital twin by tracking real-world object states via point cloud segmentation updates and aligning them through colored-ICP registration. The updated twin enables motion planners to compute collision-free and dynamically feasible trajectories in simulation, which are safely executed on the real robot through a closed real-to-sim-to-real loop. Experiments in dynamic and occluded scenes show that SyncTwin improves grasp accuracy and motion safety, demonstrating the effectiveness of digital-twin synchronization for real-world robotic execution.
A Systematic Study of Model Extraction Attacks on Graph Foundation Models
Nov 14, 2025Graph machine learning has advanced rapidly in tasks such as link prediction, anomaly detection, and node classification. As models scale up, pretrained graph models have become valuable intellectual assets because they encode extensive computation and domain expertise. Building on these advances, Graph Foundation Models (GFMs) mark a major step forward by jointly pretraining graph and text encoders on massive and diverse data. This unifies structural and semantic understanding, enables zero-shot inference, and supports applications such as fraud detection and biomedical analysis. However, the high pretraining cost and broad cross-domain knowledge in GFMs also make them attractive targets for model extraction attacks (MEAs). Prior work has focused only on small graph neural networks trained on a single graph, leaving the security implications for large-scale and multimodal GFMs largely unexplored. This paper presents the first systematic study of MEAs against GFMs. We formalize a black-box threat model and define six practical attack scenarios covering domain-level and graph-specific extraction goals, architectural mismatch, limited query budgets, partial node access, and training data discrepancies. To instantiate these attacks, we introduce a lightweight extraction method that trains an attacker encoder using supervised regression of graph embeddings. Even without contrastive pretraining data, this method learns an encoder that stays aligned with the victim text encoder and preserves its zero-shot inference ability on unseen graphs. Experiments on seven datasets show that the attacker can approximate the victim model using only a tiny fraction of its original training cost, with almost no loss in accuracy. These findings reveal that GFMs greatly expand the MEA surface and highlight the need for deployment-aware security defenses in large-scale graph learning systems.
Robotic Compliant Object Prying Using Diffusion Policy Guided by Vision and Force Observations
Mar 06, 2025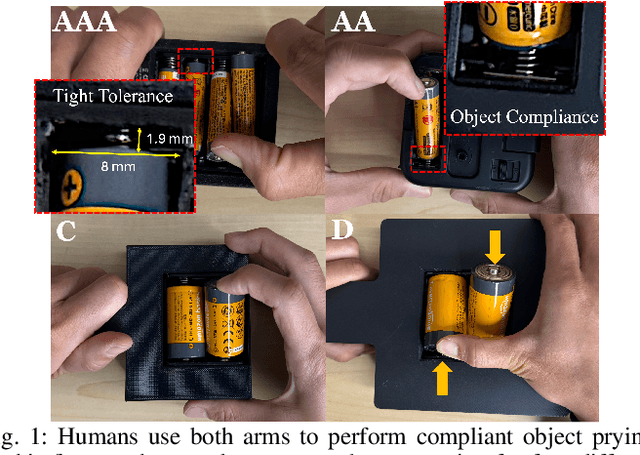
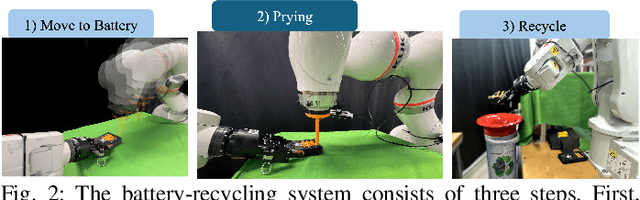
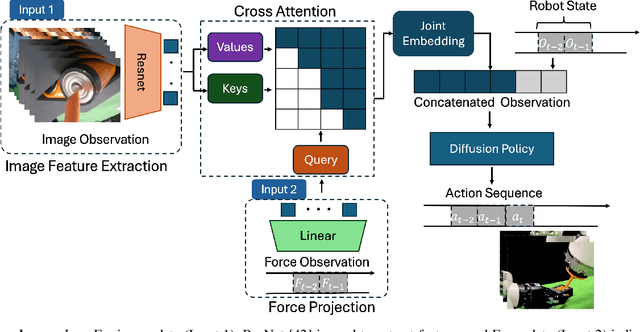
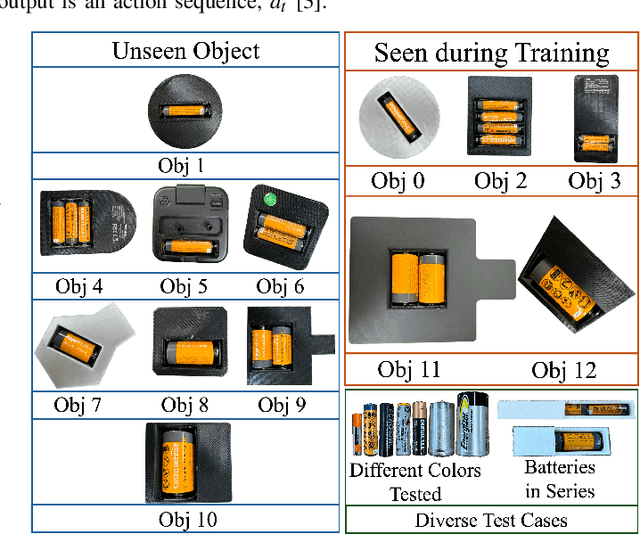
The growing adoption of batteries in the electric vehicle industry and various consumer products has created an urgent need for effective recycling solutions. These products often contain a mix of compliant and rigid components, making robotic disassembly a critical step toward achieving scalable recycling processes. Diffusion policy has emerged as a promising approach for learning low-level skills in robotics. To effectively apply diffusion policy to contact-rich tasks, incorporating force as feedback is essential. In this paper, we apply diffusion policy with vision and force in a compliant object prying task. However, when combining low-dimensional contact force with high-dimensional image, the force information may be diluted. To address this issue, we propose a method that effectively integrates force with image data for diffusion policy observations. We validate our approach on a battery prying task that demands high precision and multi-step execution. Our model achieves a 96\% success rate in diverse scenarios, marking a 57\% improvement over the vision-only baseline. Our method also demonstrates zero-shot transfer capability to handle unseen objects and battery types. Supplementary videos and implementation codes are available on our project website. https://rros-lab.github.io/diffusion-with-force.github.io/