 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Compliant Object Prying Using Diffusion Policy Guided by Vision and Force Observations
Mar 06, 2025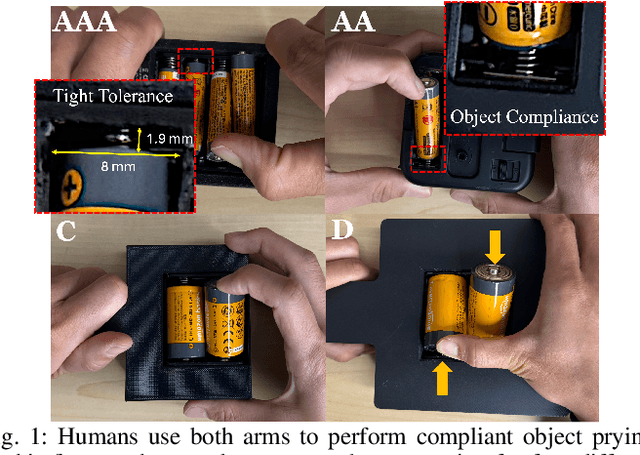
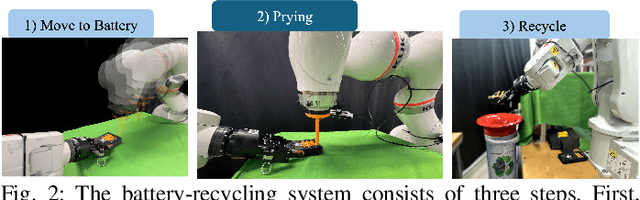
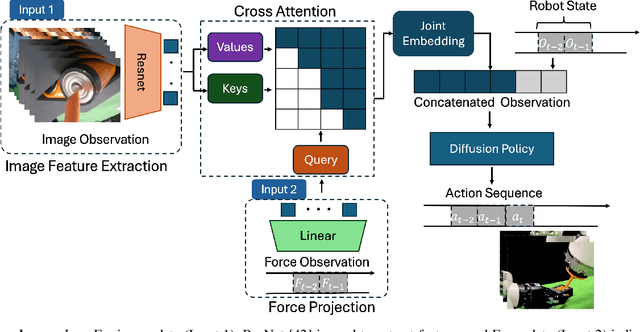
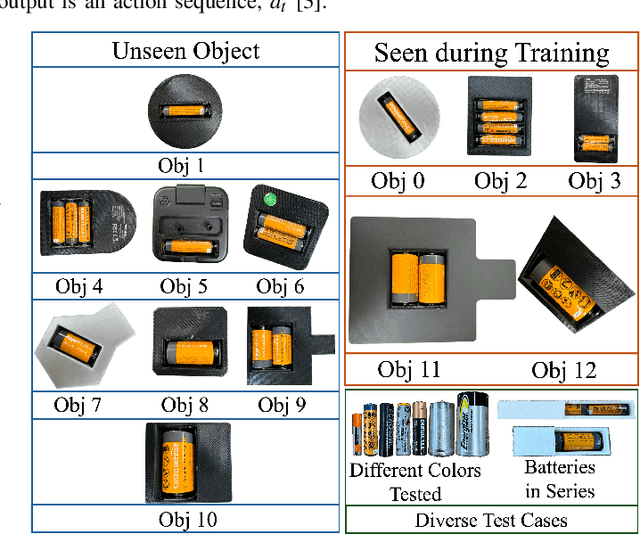
The growing adoption of batteries in the electric vehicle industry and various consumer products has created an urgent need for effective recycling solutions. These products often contain a mix of compliant and rigid components, making robotic disassembly a critical step toward achieving scalable recycling processes. Diffusion policy has emerged as a promising approach for learning low-level skills in robotics. To effectively apply diffusion policy to contact-rich tasks, incorporating force as feedback is essential. In this paper, we apply diffusion policy with vision and force in a compliant object prying task. However, when combining low-dimensional contact force with high-dimensional image, the force information may be diluted. To address this issue, we propose a method that effectively integrates force with image data for diffusion policy observations. We validate our approach on a battery prying task that demands high precision and multi-step execution. Our model achieves a 96\% success rate in diverse scenarios, marking a 57\% improvement over the vision-only baseline. Our method also demonstrates zero-shot transfer capability to handle unseen objects and battery types. Supplementary videos and implementation codes are available on our project website. https://rros-lab.github.io/diffusion-with-force.github.io/
Investigating Strategies for Clause Recommendation
Jan 21, 2023
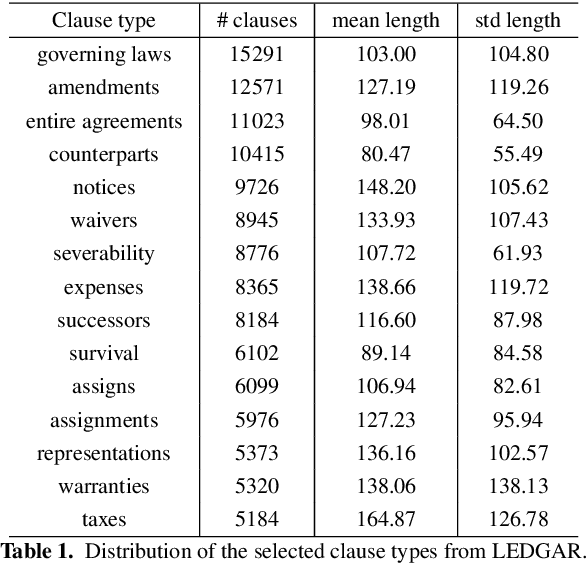
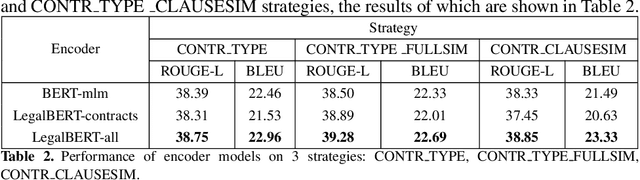

Clause recommendation is the problem of recommending a clause to a legal contract, given the context of the contract in question and the clause type to which the clause should belong. With not much prior work being done toward the generation of legal contracts, this problem was proposed as a first step toward the bigger problem of contract generation. As an open-ended text generation problem, the distinguishing characteristics of this problem lie in the nature of legal language as a sublanguage and the considerable similarity of textual content within the clauses of a specific type. This similarity aspect in legal clauses drives us to investigate the importance of similar contracts' representation for recommending clauses. In our work, we experiment with generating clauses for 15 commonly occurring clause types in contracts expanding upon the previous work on this problem and analyzing clause recommendations in varying settings using information derived from similar contracts.
* Published in Legal Knowledge and Information Systems (JURIX) 2022. (10 pages, 4 figures)
Graph-based Keyword Planning for Legal Clause Generation from Topics
Jan 07, 2023



Generating domain-specific content such as legal clauses based on minimal user-provided information can be of significant benefit in automating legal contract generation. In this paper, we propose a controllable graph-based mechanism that can generate legal clauses using only the topic or type of the legal clauses. Our pipeline consists of two stages involving a graph-based planner followed by a clause generator. The planner outlines the content of a legal clause as a sequence of keywords in the order of generic to more specific clause information based on the input topic using a controllable graph-based mechanism. The generation stage takes in a given plan and generates a clause. The pipeline consists of a graph-based planner followed by text generation. We illustrate the effectiveness of our proposed two-stage approach on a broad set of clause topics in contracts.