 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeakly-supervised Learning for Physics-informed Neural Motion Planning via Sparse Roadmap
Apr 14, 2026The motion planning problem requires finding a collision-free path between start and goal configurations in high-dimensional, cluttered spaces. Recent learning-based methods offer promising solutions, with self-supervised physics-informed approaches such as Neural Time Fields (NTFields) solving the Eikonal equation to learn value functions without expert demonstrations. However, existing physics-informed methods struggle to scale in complex, multi-room environments, where simply increasing the number of samples cannot resolve local minima or guarantee global consistency. We propose Hierarchical Neural Time Fields (H-NTFields), a weakly-supervised framework that combines weak supervision from sparse roadmaps with physics-informed PDE regularization. The roadmap provides global topological anchors through upper and lower bounds on travel times, while PDE losses enforce local geometric fidelity and obstacle-aware propagation. Experiments on 18 Gibson environments and real robotic platforms show that H-NTFields substantially improves robustness over prior physics-informed methods, while enabling fast amortized inference through a continuous value representation.
Manifold-constrained Hamilton-Jacobi Reachability Learning for Decentralized Multi-Agent Motion Planning
Nov 05, 2025Safe multi-agent motion planning (MAMP) under task-induced constraints is a critical challenge in robotics. Many real-world scenarios require robots to navigate dynamic environments while adhering to manifold constraints imposed by tasks. For example, service robots must carry cups upright while avoiding collisions with humans or other robots. Despite recent advances in decentralized MAMP for high-dimensional systems, incorporating manifold constraints remains difficult. To address this, we propose a manifold-constrained Hamilton-Jacobi reachability (HJR) learning framework for decentralized MAMP. Our method solves HJR problems under manifold constraints to capture task-aware safety conditions, which are then integrated into a decentralized trajectory optimization planner. This enables robots to generate motion plans that are both safe and task-feasible without requiring assumptions about other agents' policies. Our approach generalizes across diverse manifold-constrained tasks and scales effectively to high-dimensional multi-agent manipulation problems. Experiments show that our method outperforms existing constrained motion planners and operates at speeds suitable for real-world applications. Video demonstrations are available at https://youtu.be/RYcEHMnPTH8 .
Physics-informed Neural Motion Planning via Domain Decomposition in Large Environments
Jun 15, 2025Physics-informed Neural Motion Planners (PiNMPs) provide a data-efficient framework for solving the Eikonal Partial Differential Equation (PDE) and representing the cost-to-go function for motion planning. However, their scalability remains limited by spectral bias and the complex loss landscape of PDE-driven training. Domain decomposition mitigates these issues by dividing the environment into smaller subdomains, but existing methods enforce continuity only at individual spatial points. While effective for function approximation, these methods fail to capture the spatial connectivity required for motion planning, where the cost-to-go function depends on both the start and goal coordinates rather than a single query point. We propose Finite Basis Neural Time Fields (FB-NTFields), a novel neural field representation for scalable cost-to-go estimation. Instead of enforcing continuity in output space, FB-NTFields construct a latent space representation, computing the cost-to-go as a distance between the latent embeddings of start and goal coordinates. This enables global spatial coherence while integrating domain decomposition, ensuring efficient large-scale motion planning. We validate FB-NTFields in complex synthetic and real-world scenarios, demonstrating substantial improvements over existing PiNMPs. Finally, we deploy our method on a Unitree B1 quadruped robot, successfully navigating indoor environments. The supplementary videos can be found at https://youtu.be/OpRuCbLNOwM.
Physics-informed Temporal Difference Metric Learning for Robot Motion Planning
May 09, 2025The motion planning problem involves finding a collision-free path from a robot's starting to its target configuration. Recently, self-supervised learning methods have emerged to tackle motion planning problems without requiring expensive expert demonstrations. They solve the Eikonal equation for training neural networks and lead to efficient solutions. However, these methods struggle in complex environments because they fail to maintain key properties of the Eikonal equation, such as optimal value functions and geodesic distances. To overcome these limitations, we propose a novel self-supervised temporal difference metric learning approach that solves the Eikonal equation more accurately and enhances performance in solving complex and unseen planning tasks. Our method enforces Bellman's principle of optimality over finite regions, using temporal difference learning to avoid spurious local minima while incorporating metric learning to preserve the Eikonal equation's essential geodesic properties. We demonstrate that our approach significantly outperforms existing self-supervised learning methods in handling complex environments and generalizing to unseen environments, with robot configurations ranging from 2 to 12 degrees of freedom (DOF).
Physics-informed Neural Mapping and Motion Planning in Unknown Environments
Oct 13, 2024Mapping and motion planning are two essential elements of robot intelligence that are interdependent in generating environment maps and navigating around obstacles. The existing mapping methods create maps that require computationally expensive motion planning tools to find a path solution. In this paper, we propose a new mapping feature called arrival time fields, which is a solution to the Eikonal equation. The arrival time fields can directly guide the robot in navigating the given environments. Therefore, this paper introduces a new approach called Active Neural Time Fields (Active NTFields), which is a physics-informed neural framework that actively explores the unknown environment and maps its arrival time field on the fly for robot motion planning. Our method does not require any expert data for learning and uses neural networks to directly solve the Eikonal equation for arrival time field mapping and motion planning. We benchmark our approach against state-of-the-art mapping and motion planning methods and demonstrate its superior performance in both simulated and real-world environments with a differential drive robot and a 6 degrees-of-freedom (DOF) robot manipulator. The supplementary videos can be found at https://youtu.be/qTPL5a6pRKk, and the implementation code repository is available at https://github.com/Rtlyc/antfields-demo.
Physics-informed Neural Motion Planning on Constraint Manifolds
Mar 09, 2024Constrained Motion Planning (CMP) aims to find a collision-free path between the given start and goal configurations on the kinematic constraint manifolds. These problems appear in various scenarios ranging from object manipulation to legged-robot locomotion. However, the zero-volume nature of manifolds makes the CMP problem challenging, and the state-of-the-art methods still take several seconds to find a path and require a computationally expansive path dataset for imitation learning. Recently, physics-informed motion planning methods have emerged that directly solve the Eikonal equation through neural networks for motion planning and do not require expert demonstrations for learning. Inspired by these approaches, we propose the first physics-informed CMP framework that solves the Eikonal equation on the constraint manifolds and trains neural function for CMP without expert data. Our results show that the proposed approach efficiently solves various CMP problems in both simulation and real-world, including object manipulation under orientation constraints and door opening with a high-dimensional 6-DOF robot manipulator. In these complex settings, our method exhibits high success rates and finds paths in sub-seconds, which is many times faster than the state-of-the-art CMP methods.
Progressive Learning for Physics-informed Neural Motion Planning
Jun 01, 2023Motion planning (MP) is one of the core robotics problems requiring fast methods for finding a collision-free robot motion path connecting the given start and goal states. Neural motion planners (NMPs) demonstrate fast computational speed in finding path solutions but require a huge amount of expert trajectories for learning, thus adding a significant training computational load. In contrast, recent advancements have also led to a physics-informed NMP approach that directly solves the Eikonal equation for motion planning and does not require expert demonstrations for learning. However, experiments show that the physics-informed NMP approach performs poorly in complex environments and lacks scalability in multiple scenarios and high-dimensional real robot settings. To overcome these limitations, this paper presents a novel and tractable Eikonal equation formulation and introduces a new progressive learning strategy to train neural networks without expert data in complex, cluttered, multiple high-dimensional robot motion planning scenarios. The results demonstrate that our method outperforms state-of-the-art traditional MP, data-driven NMP, and physics-informed NMP methods by a significant margin in terms of computational planning speed, path quality, and success rates. We also show that our approach scales to multiple complex, cluttered scenarios and the real robot set up in a narrow passage environment. The proposed method's videos and code implementations are available at https://github.com/ruiqini/P-NTFields.
NTFields: Neural Time Fields for Physics-Informed Robot Motion Planning
Sep 30, 2022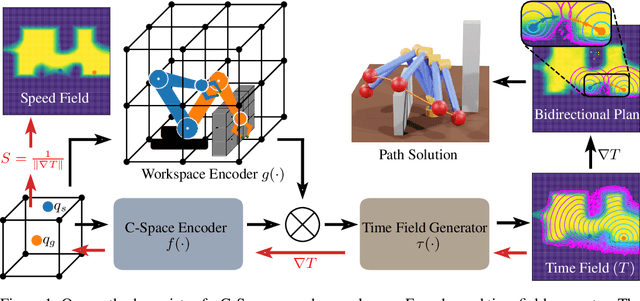

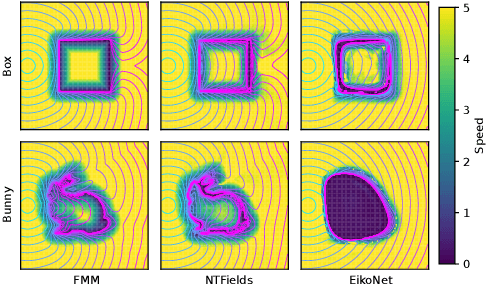
Neural Motion Planners (NMPs) have emerged as a promising tool for solving robot navigation tasks in complex environments. However, these methods often require expert data for learning, which limits their application to scenarios where data generation is time-consuming. Recent developments have also led to physics-informed deep neural models capable of representing complex dynamical Partial Differential Equations (PDEs). Inspired by these developments, we propose Neural Time Fields (NTFields) for robot motion planning in cluttered scenarios. Our framework represents a wave propagation model generating continuous arrival time to find path solutions informed by a nonlinear first-order PDE called Eikonal Equation. We evaluate our method in various cluttered 3D environments, including the Gibson dataset, and demonstrate its ability to solve motion planning problems for 4-DOF and 6-DOF robot manipulators where the traditional grid-based Eikonal planners often face the curse of dimensionality. Furthermore, the results show that our method exhibits high success rates and significantly lower computational times than the state-of-the-art methods, including NMPs that require training data from classical planners.
Robust Multi-Robot Trajectory Generation Using Alternating Direction Method of Multiplier
Nov 18, 2021
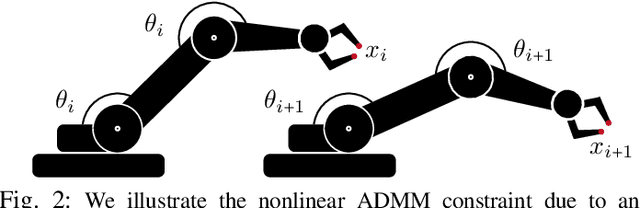
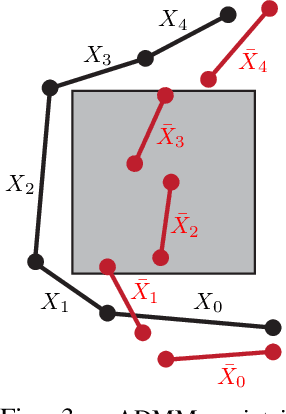
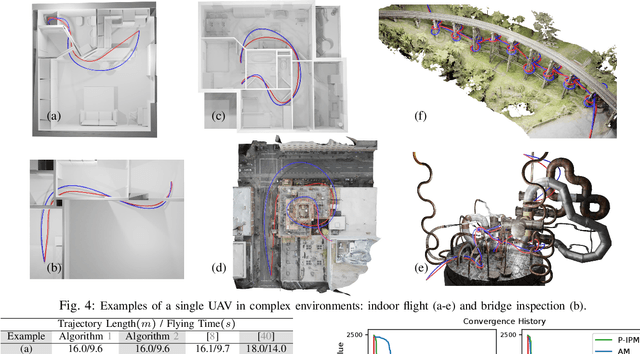
We propose a variant of alternating direction method of multiplier (ADMM) to solve constrained trajectory optimization problems. Our ADMM framework breaks a joint optimization into small sub-problems, leading to a low iteration cost and decentralized parameter updates. Our method inherits the theoretical properties of primal interior point method (P-IPM), i.e., guaranteed collision avoidance and homotopy preservation, while being orders of magnitude faster. We have analyzed the convergence and evaluated our method for time-optimal multi-UAV trajectory optimizations and simultaneous goal-reaching of multiple robot arms, where we take into consider kinematics-, dynamics-limits, and homotopy-preserving collision constraints. Our method highlights 10-100 times speedup, while generating trajectories of comparable qualities as state-of-the-art P-IPM solver.
Multi-Robot Path Planning in Complex Environments via Graph Embedding
Aug 07, 2021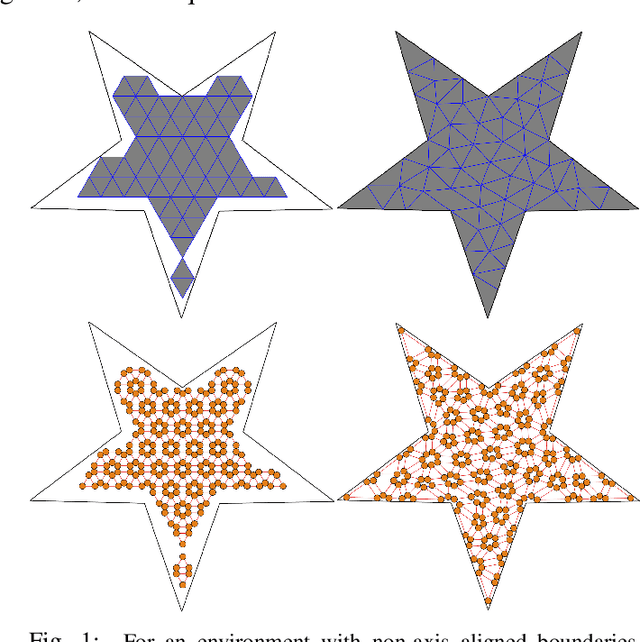
We propose an approach to solve multi-agent path planning (MPP) problems for complex environments. Our method first designs a special pebble graph with a set of feasibility constraints, under which MPP problems have feasibility guarantee. We further propose an algorithm to greedily improve the optimality of planned MPP solutions via parallel pebble motions. As a second step, we develop a mesh optimization algorithm to embed our pebble graph into arbitrarily complex environments. We show that the feasibility constraints of a pebble graph can be converted into differentiable geometric constraints, such that our mesh optimizer can satisfy these constraints via constrained numerical optimization. We have evaluated the effectiveness and efficiency of our method using a set of environments with complex geometries, on which our method achieves an average of 99.0% free-space coverage and 30.3% robot density within hours of computation on a desktop machine.