 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Multi-Robot Trajectory Generation Using Alternating Direction Method of Multiplier
Paper and Code
Nov 18, 2021
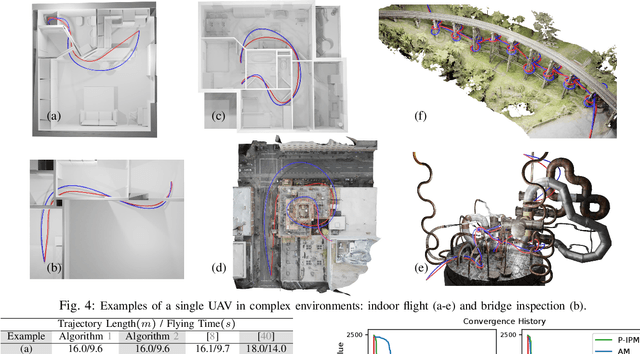
We propose a variant of alternating direction method of multiplier (ADMM) to solve constrained trajectory optimization problems. Our ADMM framework breaks a joint optimization into small sub-problems, leading to a low iteration cost and decentralized parameter updates. Our method inherits the theoretical properties of primal interior point method (P-IPM), i.e., guaranteed collision avoidance and homotopy preservation, while being orders of magnitude faster. We have analyzed the convergence and evaluated our method for time-optimal multi-UAV trajectory optimizations and simultaneous goal-reaching of multiple robot arms, where we take into consider kinematics-, dynamics-limits, and homotopy-preserving collision constraints. Our method highlights 10-100 times speedup, while generating trajectories of comparable qualities as state-of-the-art P-IPM solver.