 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBI-DCGAN: A Theoretically Grounded Bayesian Framework for Efficient and Diverse GANs
Oct 30, 2025Generative Adversarial Networks (GANs) are proficient at generating synthetic data but continue to suffer from mode collapse, where the generator produces a narrow range of outputs that fool the discriminator but fail to capture the full data distribution. This limitation is particularly problematic, as generative models are increasingly deployed in real-world applications that demand both diversity and uncertainty awareness. In response, we introduce BI-DCGAN, a Bayesian extension of DCGAN that incorporates model uncertainty into the generative process while maintaining computational efficiency. BI-DCGAN integrates Bayes by Backprop to learn a distribution over network weights and employs mean-field variational inference to efficiently approximate the posterior distribution during GAN training. We establishes the first theoretical proof, based on covariance matrix analysis, that Bayesian modeling enhances sample diversity in GANs. We validate this theoretical result through extensive experiments on standard generative benchmarks, demonstrating that BI-DCGAN produces more diverse and robust outputs than conventional DCGANs, while maintaining training efficiency. These findings position BI-DCGAN as a scalable and timely solution for applications where both diversity and uncertainty are critical, and where modern alternatives like diffusion models remain too resource-intensive.
Aggregation Models with Optimal Weights for Distributed Gaussian Processes
Aug 01, 2024Gaussian process (GP) models have received increasingly attentions in recent years due to their superb prediction accuracy and modeling flexibility. To address the computational burdens of GP models for large-scale datasets, distributed learning for GPs are often adopted. Current aggregation models for distributed GPs are not time-efficient when incorporating correlations between GP experts. In this work, we propose a novel approach for aggregated prediction in distributed GPs. The technique is suitable for both the exact and sparse variational GPs. The proposed method incorporates correlations among experts, leading to better prediction accuracy with manageable computational requirements. As demonstrated by empirical studies, the proposed approach results in more stable predictions in less time than state-of-the-art consistent aggregation models.
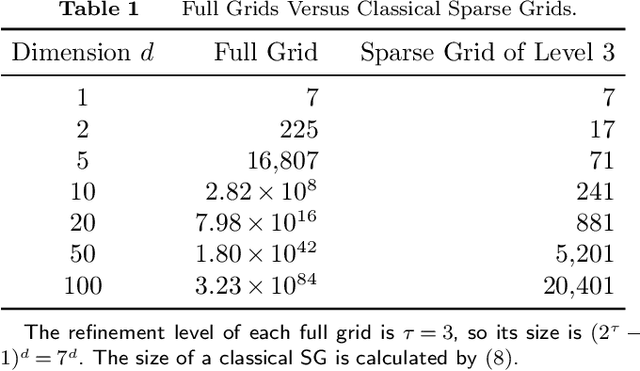
Gaussian Processes Sampling with Sparse Grids under Additive Schwarz Preconditioner
Aug 01, 2024Gaussian processes (GPs) are widely used in non-parametric Bayesian modeling, and play an important role in various statistical and machine learning applications. In a variety tasks of uncertainty quantification, generating random sample paths of GPs is of interest. As GP sampling requires generating high-dimensional Gaussian random vectors, it is computationally challenging if a direct method, such as the Cholesky decomposition, is used. In this paper, we propose a scalable algorithm for sampling random realizations of the prior and posterior of GP models. The proposed algorithm leverages inducing points approximation with sparse grids, as well as additive Schwarz preconditioners, which reduce computational complexity, and ensure fast convergence. We demonstrate the efficacy and accuracy of the proposed method through a series of experiments and comparisons with other recent works.
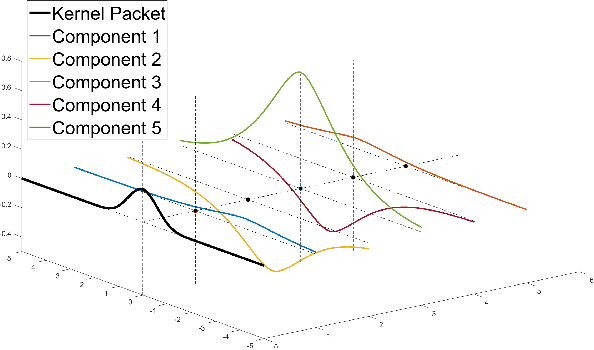
A General Theory for Kernel Packets: from state space model to compactly supported basis
Feb 08, 2024It is well known that the state space (SS) model formulation of a Gaussian process (GP) can lower its training and prediction time both to O(n) for n data points. We prove that an $m$-dimensional SS model formulation of GP is equivalent to a concept we introduce as the general right Kernel Packet (KP): a transformation for the GP covariance function $K$ such that $\sum_{i=0}^{m}a_iD_t^{(j)}K(t,t_i)=0$ holds for any $t \leq t_1$, 0 $\leq j \leq m-1$, and $m+1$ consecutive points $t_i$, where ${D}_t^{(j)}f(t) $ denotes $j$-th order derivative acting on $t$. We extend this idea to the backward SS model formulation of the GP, leading to the concept of the left KP for next $m$ consecutive points: $\sum_{i=0}^{m}b_i{D}_t^{(j)}K(t,t_{m+i})=0$ for any $t\geq t_{2m}$. By combining both left and right KPs, we can prove that a suitable linear combination of these covariance functions yields $m$ compactly supported KP functions: $\phi^{(j)}(t)=0$ for any $t\not\in(t_0,t_{2m})$ and $j=0,\cdots,m-1$. KPs further reduce the prediction time of GP to O(log n) or even O(1), can be applied to more general problems involving the derivative of GPs, and have multi-dimensional generalization for scattered data.
Privacy-aware Gaussian Process Regression
May 25, 2023We propose the first theoretical and methodological framework for Gaussian process regression subject to privacy constraints. The proposed method can be used when a data owner is unwilling to share a high-fidelity supervised learning model built from their data with the public due to privacy concerns. The key idea of the proposed method is to add synthetic noise to the data until the predictive variance of the Gaussian process model reaches a prespecified privacy level. The optimal covariance matrix of the synthetic noise is formulated in terms of semi-definite programming. We also introduce the formulation of privacy-aware solutions under continuous privacy constraints using kernel-based approaches, and study their theoretical properties. The proposed method is illustrated by considering a model that tracks the trajectories of satellites.
Renewing Iterative Self-labeling Domain Adaptation with Application to the Spine Motion Prediction
Nov 14, 2022The area of transfer learning comprises supervised machine learning methods that cope with the issue when the training and testing data have different input feature spaces or distributions. In this work, we propose a novel transfer learning algorithm called Renewing Iterative Self-labeling Domain Adaptation (Re-ISDA). In this work, we propose a novel transfer learning algorithm called Renewing Iterative Self-labeling Domain Adaptation (Re-ISDA).
Kernel Packet: An Exact and Scalable Algorithm for Gaussian Process Regression with Matérn Correlations
Mar 09, 2022
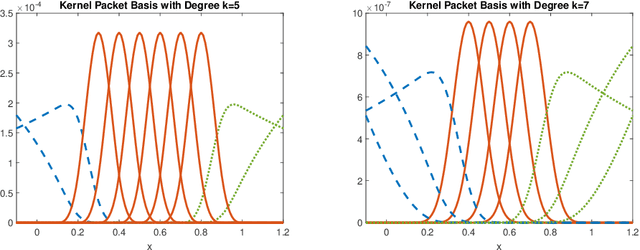

We develop an exact and scalable algorithm for one-dimensional Gaussian process regression with Mat\'ern correlations whose smoothness parameter $\nu$ is a half-integer. The proposed algorithm only requires $\mathcal{O}(\nu^3 n)$ operations and $\mathcal{O}(\nu n)$ storage. This leads to a linear-cost solver since $\nu$ is chosen to be fixed and usually very small in most applications. The proposed method can be applied to multi-dimensional problems if a full grid or a sparse grid design is used. The proposed method is based on a novel theory for Mat\'ern correlation functions. We find that a suitable rearrangement of these correlation functions can produce a compactly supported function, called a "kernel packet". Using a set of kernel packets as basis functions leads to a sparse representation of the covariance matrix that results in the proposed algorithm. Simulation studies show that the proposed algorithm, when applicable, is significantly superior to the existing alternatives in both the computational time and predictive accuracy.
A Sparse Expansion For Deep Gaussian Processes
Dec 11, 2021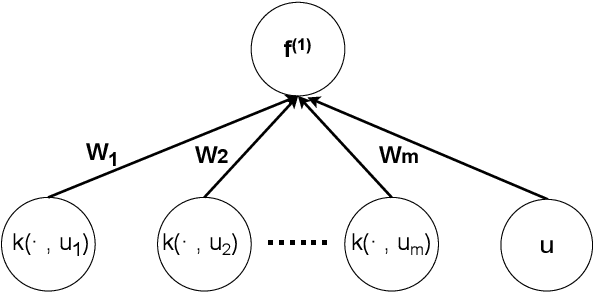
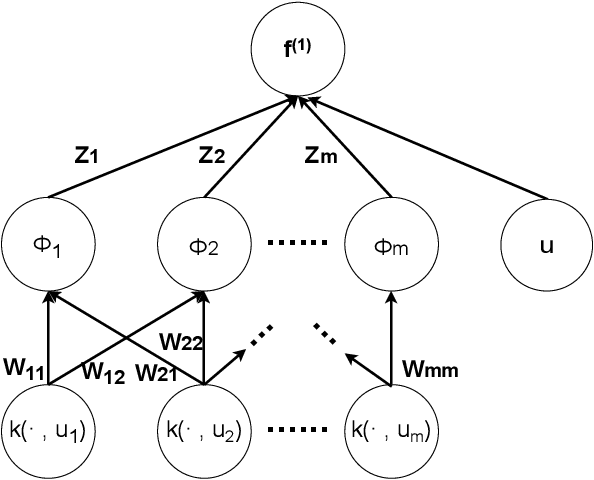

Deep Gaussian Processes (DGP) enable a non-parametric approach to quantify the uncertainty of complex deep machine learning models. Conventional inferential methods for DGP models can suffer from high computational complexity as they require large-scale operations with kernel matrices for training and inference. In this work, we propose an efficient scheme for accurate inference and prediction based on a range of Gaussian Processes, called the Tensor Markov Gaussian Processes (TMGP). We construct an induced approximation of TMGP referred to as the hierarchical expansion. Next, we develop a deep TMGP (DTMGP) model as the composition of multiple hierarchical expansion of TMGPs. The proposed DTMGP model has the following properties: (1) the outputs of each activation function are deterministic while the weights are chosen independently from standard Gaussian distribution; (2) in training or prediction, only O(polylog(M)) (out of M) activation functions have non-zero outputs, which significantly boosts the computational efficiency. Our numerical experiments on real datasets show the superior computational efficiency of DTMGP versus other DGP models.
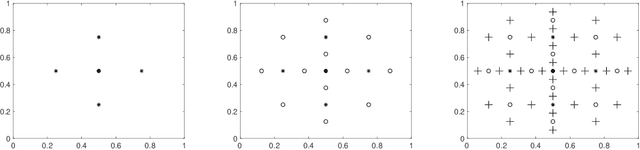
High-Dimensional Simulation Optimization via Brownian Fields and Sparse Grids
Jul 20, 2021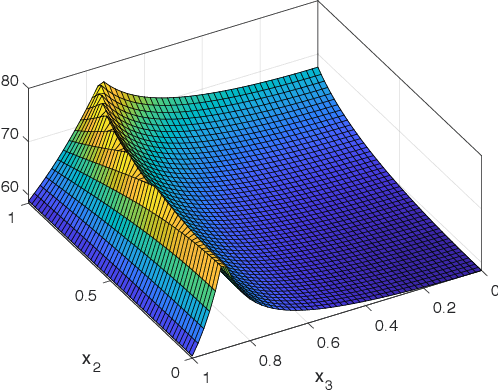


High-dimensional simulation optimization is notoriously challenging. We propose a new sampling algorithm that converges to a global optimal solution and suffers minimally from the curse of dimensionality. The algorithm consists of two stages. First, we take samples following a sparse grid experimental design and approximate the response surface via kernel ridge regression with a Brownian field kernel. Second, we follow the expected improvement strategy -- with critical modifications that boost the algorithm's sample efficiency -- to iteratively sample from the next level of the sparse grid. Under mild conditions on the smoothness of the response surface and the simulation noise, we establish upper bounds on the convergence rate for both noise-free and noisy simulation samples. These upper bounds deteriorate only slightly in the dimension of the feasible set, and they can be improved if the objective function is known to be of a higher-order smoothness. Extensive numerical experiments demonstrate that the proposed algorithm dramatically outperforms typical alternatives in practice.
The temporal overfitting problem with applications in wind power curve modeling
Dec 02, 2020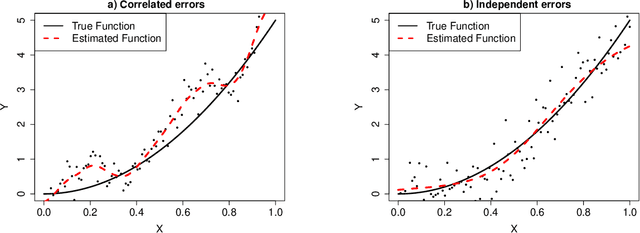
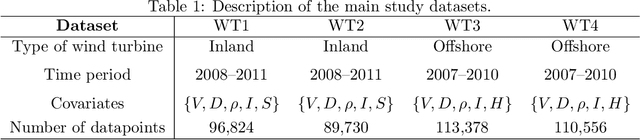


This paper is concerned with a nonparametric regression problem in which the independence assumption of the input variables and the residuals is no longer valid. Using existing model selection methods, like cross validation, the presence of temporal autocorrelation in the input variables and the error terms leads to model overfitting. This phenomenon is referred to as temporal overfitting, which causes loss of performance while predicting responses for a time domain different from the training time domain. We propose a new method to tackle the temporal overfitting problem. Our nonparametric model is partitioned into two parts -- a time-invariant component and a time-varying component, each of which is modeled through a Gaussian process regression. The key in our inference is a thinning-based strategy, an idea borrowed from Markov chain Monte Carlo sampling, to estimate the two components, respectively. Our specific application in this paper targets the power curve modeling in wind energy. In our numerical studies, we compare extensively our proposed method with both existing power curve models and available ideas for handling temporal overfitting. Our approach yields significant improvement in prediction both in and outside the time domain covered by the training data.