 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Synthetic Ground Truth Distributions for Multi-step Trajectory Prediction using Probabilistic Composite Bézier Curves
Apr 05, 2024


An appropriate data basis grants one of the most important aspects for training and evaluating probabilistic trajectory prediction models based on neural networks. In this regard, a common shortcoming of current benchmark datasets is their limitation to sets of sample trajectories and a lack of actual ground truth distributions, which prevents the use of more expressive error metrics, such as the Wasserstein distance for model evaluation. Towards this end, this paper proposes a novel approach to synthetic dataset generation based on composite probabilistic B\'ezier curves, which is capable of generating ground truth data in terms of probability distributions over full trajectories. This allows the calculation of arbitrary posterior distributions. The paper showcases an exemplary trajectory prediction model evaluation using generated ground truth distribution data.
Utilizing dataset affinity prediction in object detection to assess training data
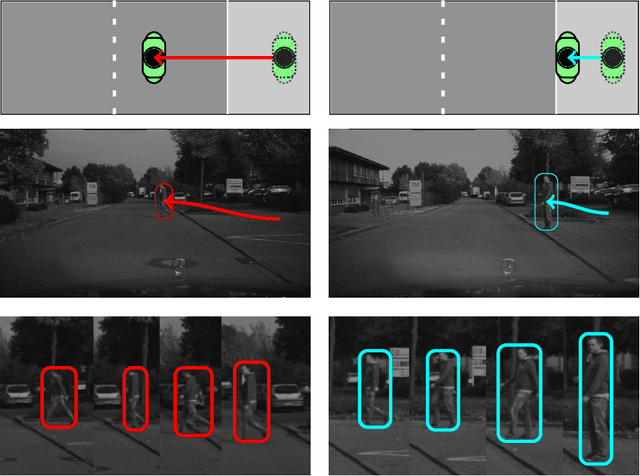
Nov 16, 2023Data pooling offers various advantages, such as increasing the sample size, improving generalization, reducing sampling bias, and addressing data sparsity and quality, but it is not straightforward and may even be counterproductive. Assessing the effectiveness of pooling datasets in a principled manner is challenging due to the difficulty in estimating the overall information content of individual datasets. Towards this end, we propose incorporating a data source prediction module into standard object detection pipelines. The module runs with minimal overhead during inference time, providing additional information about the data source assigned to individual detections. We show the benefits of the so-called dataset affinity score by automatically selecting samples from a heterogeneous pool of vehicle datasets. The results show that object detectors can be trained on a significantly sparser set of training samples without losing detection accuracy.
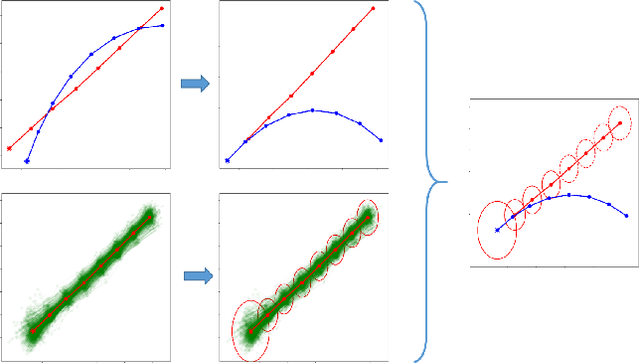
Bézier Curve Gaussian Processes
May 03, 2022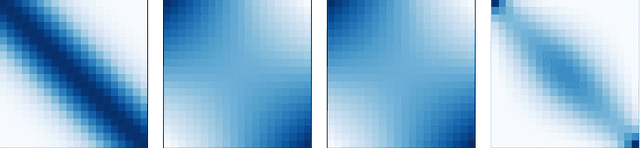



Probabilistic models for sequential data are the basis for a variety of applications concerned with processing timely ordered information. The predominant approach in this domain is given by neural networks, which incorporate either stochastic units or components. This paper proposes a new probabilistic sequence model building on probabilistic B\'ezier curves. Using Gaussian distributed control points, these parametric curves pose a special case for Gaussian processes (GP). Combined with a Mixture Density network, Bayesian conditional inference can be performed without the need for mean field variational approximation or Monte Carlo simulation, which is a requirement of common approaches. For assessing this hybrid model's viability, it is applied to an exemplary sequence prediction task. In this case the model is used for pedestrian trajectory prediction, where a generated prediction also serves as a GP prior. Following this, the initial prediction can be refined using the GP framework by calculating different posterior distributions, in order to adapt more towards a given observed trajectory segment.
MissFormer: (In-)attention-based handling of missing observations for trajectory filtering and prediction
Jul 06, 2021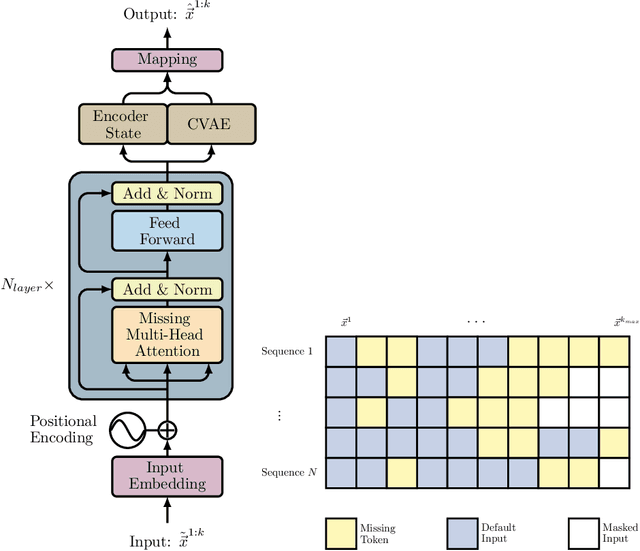


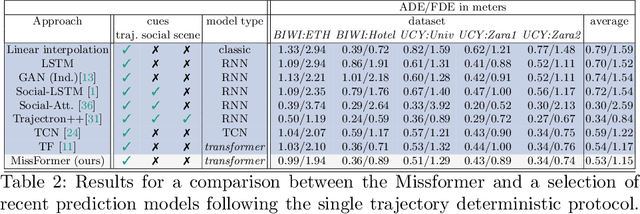
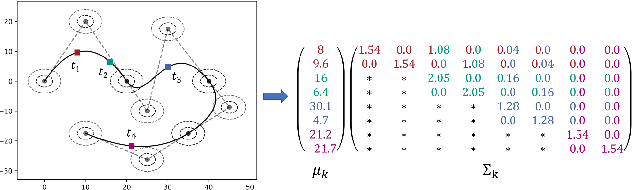
In applications such as object tracking, time-series data inevitably carry missing observations. Following the success of deep learning-based models for various sequence learning tasks, these models increasingly replace classic approaches in object tracking applications for inferring the objects' motion states. While traditional tracking approaches can deal with missing observations, most of their deep counterparts are, by default, not suited for this. Towards this end, this paper introduces a transformer-based approach for handling missing observations in variable input length trajectory data. The model is formed indirectly by successively increasing the complexity of the demanded inference tasks. Starting from reproducing noise-free trajectories, the model then learns to infer trajectories from noisy inputs. By providing missing tokens, binary-encoded missing events, the model learns to in-attend to missing data and infers a complete trajectory conditioned on the remaining inputs. In the case of a sequence of successive missing events, the model then acts as a pure prediction model. The abilities of the approach are demonstrated on synthetic data and real-world data reflecting prototypical object tracking scenarios.
Generating Synthetic Training Data for Deep Learning-Based UAV Trajectory Prediction
Jul 01, 2021
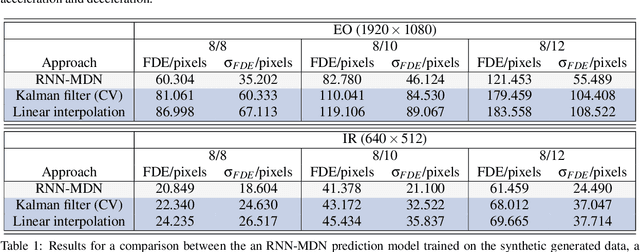
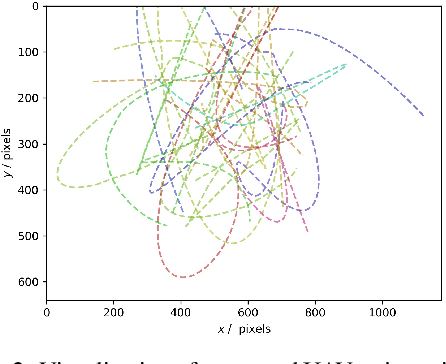
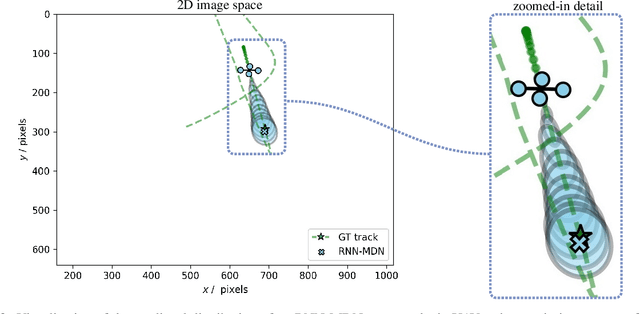
Deep learning-based models, such as recurrent neural networks (RNNs), have been applied to various sequence learning tasks with great success. Following this, these models are increasingly replacing classic approaches in object tracking applications for motion prediction. On the one hand, these models can capture complex object dynamics with less modeling required, but on the other hand, they depend on a large amount of training data for parameter tuning. Towards this end, we present an approach for generating synthetic trajectory data of unmanned-aerial-vehicles (UAVs) in image space. Since UAVs, or rather quadrotors are dynamical systems, they can not follow arbitrary trajectories. With the prerequisite that UAV trajectories fulfill a smoothness criterion corresponding to a minimal change of higher-order motion, methods for planning aggressive quadrotors flights can be utilized to generate optimal trajectories through a sequence of 3D waypoints. By projecting these maneuver trajectories, which are suitable for controlling quadrotors, to image space, a versatile trajectory data set is realized. To demonstrate the applicability of the synthetic trajectory data, we show that an RNN-based prediction model solely trained on the generated data can outperform classic reference models on a real-world UAV tracking dataset. The evaluation is done on the publicly available ANTI-UAV dataset.
Handling Missing Observations with an RNN-based Prediction-Update Cycle
Mar 22, 2021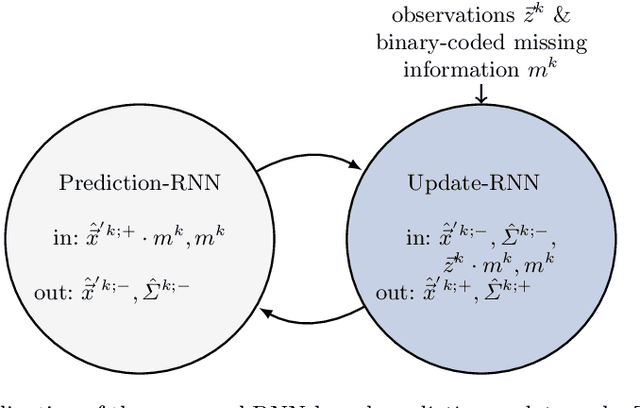
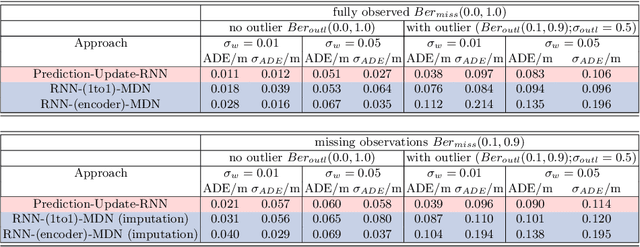
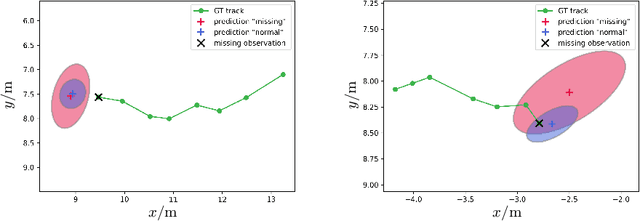

In tasks such as tracking, time-series data inevitably carry missing observations. While traditional tracking approaches can handle missing observations, recurrent neural networks (RNNs) are designed to receive input data in every step. Furthermore, current solutions for RNNs, like omitting the missing data or data imputation, are not sufficient to account for the resulting increased uncertainty. Towards this end, this paper introduces an RNN-based approach that provides a full temporal filtering cycle for motion state estimation. The Kalman filter inspired approach, enables to deal with missing observations and outliers. For providing a full temporal filtering cycle, a basic RNN is extended to take observations and the associated belief about its accuracy into account for updating the current state. An RNN prediction model, which generates a parametrized distribution to capture the predicted states, is combined with an RNN update model, which relies on the prediction model output and the current observation. By providing the model with masking information, binary-encoded missing events, the model can overcome limitations of standard techniques for dealing with missing input values. The model abilities are demonstrated on synthetic data reflecting prototypical pedestrian tracking scenarios.
Quantifying the Complexity of Standard Benchmarking Datasets for Long-Term Human Trajectory Prediction
May 28, 2020
Methods to quantify the complexity of trajectory datasets are still a missing piece in benchmarking human trajectory prediction models. In order to gain a better understanding of the complexity of trajectory datasets, an approach for deriving complexity scores from a prototype-based dataset representation is proposed. The dataset representation is obtained by first employing a non-trivial spatial sequence alignment, which enables a following learning vector quantization (LVQ) stage. A large-scale complexity analysis is conducted on several human trajectory prediction benchmarking datasets, followed by a brief discussion on indications for human trajectory prediction and benchmarking.
A Short Note on Analyzing Sequence Complexity in Trajectory Prediction Benchmarks
Mar 27, 2020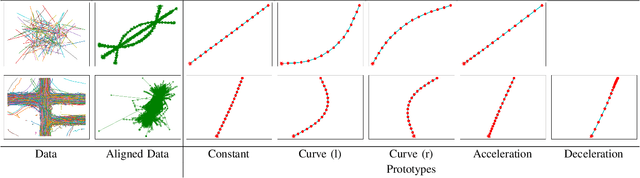
The analysis and quantification of sequence complexity is an open problem frequently encountered when defining trajectory prediction benchmarks. In order to enable a more informative assembly of a data basis, an approach for determining a dataset representation in terms of a small set of distinguishable prototypical sub-sequences is proposed. The approach employs a sequence alignment followed by a learning vector quantization (LVQ) stage. A first proof of concept on synthetically generated and real-world datasets shows the viability of the approach.
Modeling continuous-time stochastic processes using $\mathcal{N}$-Curve mixtures
Sep 16, 2019

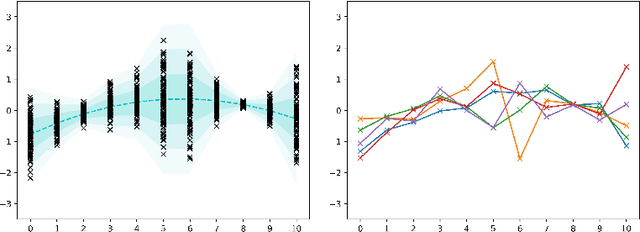
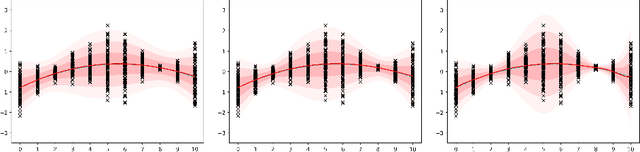
Representations of sequential data are commonly based on the assumption that observed sequences are realizations of an unknown underlying stochastic process, where the learning problem includes determination of the model parameters. In this context the model must be able to capture the multi-modal nature of the data, without blurring between modes. This property is essential for applications like trajectory prediction or human motion modeling. Towards this end, a neural network model for continuous-time stochastic processes usable for sequence prediction is proposed. The model is based on Mixture Density Networks using B\'ezier curves with Gaussian random variables as control points (abbrev.: $\mathcal{N}$-Curves). Key advantages of the model include the ability of generating smooth multi-mode predictions in a single inference step which reduces the need for Monte Carlo simulation, as required in many multi-step prediction models, based on state-of-the-art neural networks. Essential properties of the proposed approach are illustrated by several toy examples and the task of multi-step sequence prediction. Further, the model performance is evaluated on two real world use-cases, i.e. human trajectory prediction and human motion modeling, outperforming different state-of-the-art models.
An RNN-based IMM Filter Surrogate
Feb 05, 2019


The problem of varying dynamics of tracked objects, such as pedestrians, is traditionally tackled with approaches like the Interacting Multiple Model (IMM) filter using a Bayesian formulation. By following the current trend towards using deep neural networks, in this paper an RNN-based IMM filter surrogate is presented. Similar to an IMM filter solution, the presented RNN-based model assigns a probability value to a performed dynamic and, based on them, puts out a multi-modal distribution over future pedestrian trajectories. The evaluation is done on synthetic data, reflecting prototypical pedestrian maneuvers.