Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn RNN-based IMM Filter Surrogate
Paper and Code
Feb 05, 2019

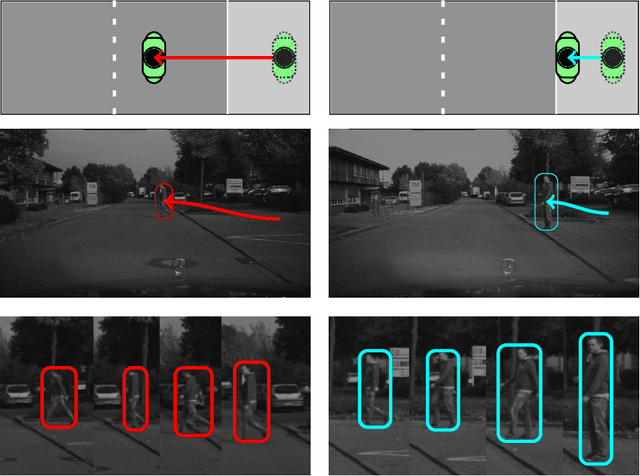

The problem of varying dynamics of tracked objects, such as pedestrians, is traditionally tackled with approaches like the Interacting Multiple Model (IMM) filter using a Bayesian formulation. By following the current trend towards using deep neural networks, in this paper an RNN-based IMM filter surrogate is presented. Similar to an IMM filter solution, the presented RNN-based model assigns a probability value to a performed dynamic and, based on them, puts out a multi-modal distribution over future pedestrian trajectories. The evaluation is done on synthetic data, reflecting prototypical pedestrian maneuvers.
View paper on