 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMissFormer: (In-)attention-based handling of missing observations for trajectory filtering and prediction
Jul 06, 2021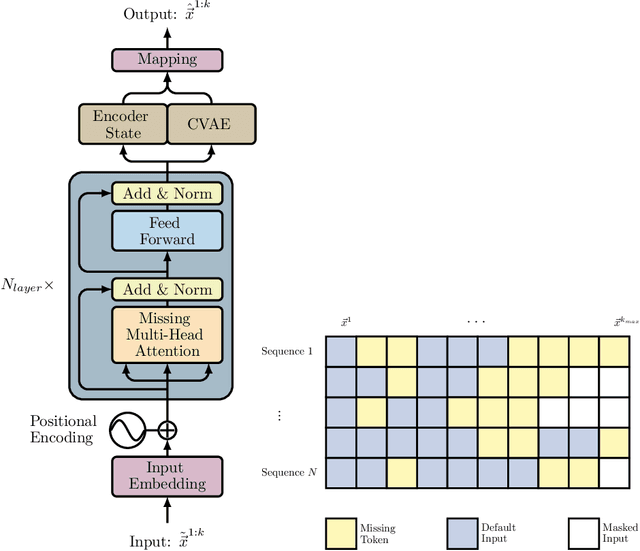


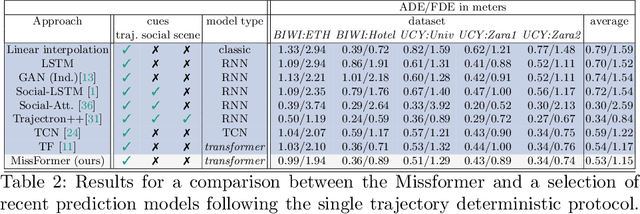
In applications such as object tracking, time-series data inevitably carry missing observations. Following the success of deep learning-based models for various sequence learning tasks, these models increasingly replace classic approaches in object tracking applications for inferring the objects' motion states. While traditional tracking approaches can deal with missing observations, most of their deep counterparts are, by default, not suited for this. Towards this end, this paper introduces a transformer-based approach for handling missing observations in variable input length trajectory data. The model is formed indirectly by successively increasing the complexity of the demanded inference tasks. Starting from reproducing noise-free trajectories, the model then learns to infer trajectories from noisy inputs. By providing missing tokens, binary-encoded missing events, the model learns to in-attend to missing data and infers a complete trajectory conditioned on the remaining inputs. In the case of a sequence of successive missing events, the model then acts as a pure prediction model. The abilities of the approach are demonstrated on synthetic data and real-world data reflecting prototypical object tracking scenarios.
Generating Synthetic Training Data for Deep Learning-Based UAV Trajectory Prediction
Jul 01, 2021
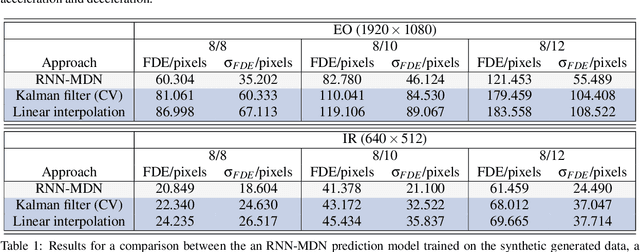
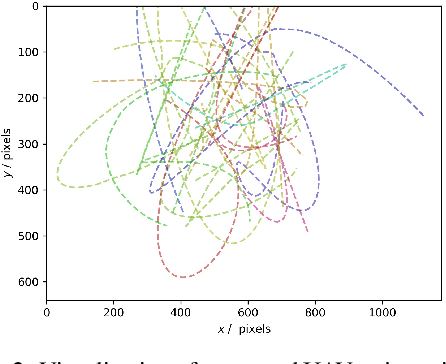
Deep learning-based models, such as recurrent neural networks (RNNs), have been applied to various sequence learning tasks with great success. Following this, these models are increasingly replacing classic approaches in object tracking applications for motion prediction. On the one hand, these models can capture complex object dynamics with less modeling required, but on the other hand, they depend on a large amount of training data for parameter tuning. Towards this end, we present an approach for generating synthetic trajectory data of unmanned-aerial-vehicles (UAVs) in image space. Since UAVs, or rather quadrotors are dynamical systems, they can not follow arbitrary trajectories. With the prerequisite that UAV trajectories fulfill a smoothness criterion corresponding to a minimal change of higher-order motion, methods for planning aggressive quadrotors flights can be utilized to generate optimal trajectories through a sequence of 3D waypoints. By projecting these maneuver trajectories, which are suitable for controlling quadrotors, to image space, a versatile trajectory data set is realized. To demonstrate the applicability of the synthetic trajectory data, we show that an RNN-based prediction model solely trained on the generated data can outperform classic reference models on a real-world UAV tracking dataset. The evaluation is done on the publicly available ANTI-UAV dataset.
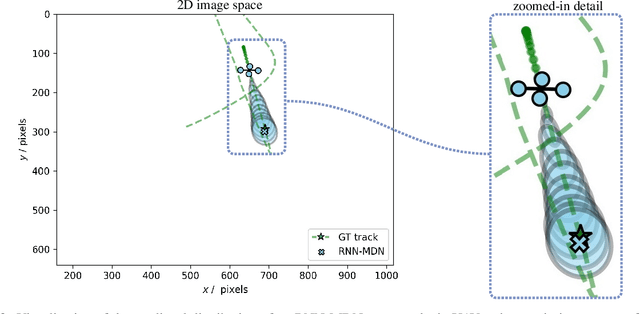
Handling Missing Observations with an RNN-based Prediction-Update Cycle
Mar 22, 2021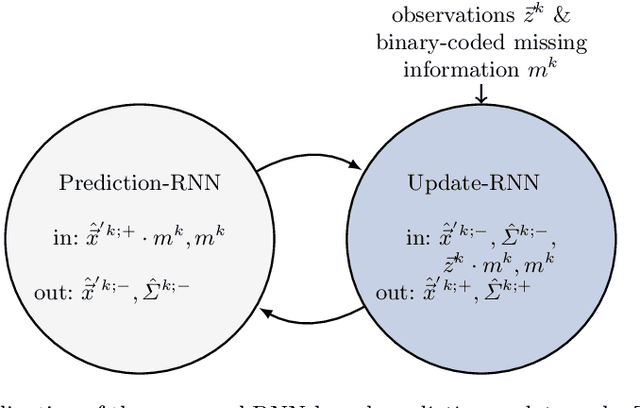
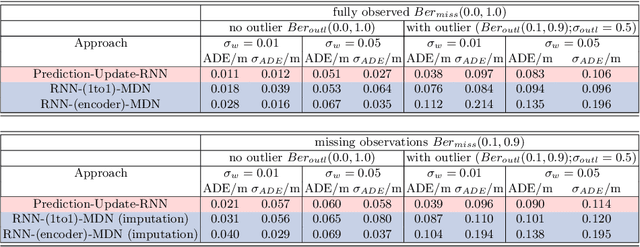
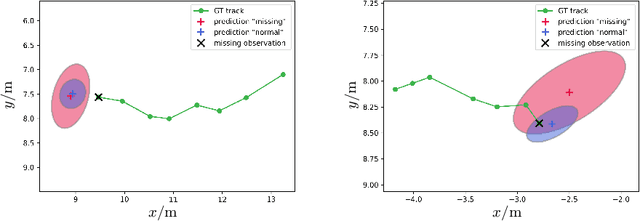

In tasks such as tracking, time-series data inevitably carry missing observations. While traditional tracking approaches can handle missing observations, recurrent neural networks (RNNs) are designed to receive input data in every step. Furthermore, current solutions for RNNs, like omitting the missing data or data imputation, are not sufficient to account for the resulting increased uncertainty. Towards this end, this paper introduces an RNN-based approach that provides a full temporal filtering cycle for motion state estimation. The Kalman filter inspired approach, enables to deal with missing observations and outliers. For providing a full temporal filtering cycle, a basic RNN is extended to take observations and the associated belief about its accuracy into account for updating the current state. An RNN prediction model, which generates a parametrized distribution to capture the predicted states, is combined with an RNN update model, which relies on the prediction model output and the current observation. By providing the model with masking information, binary-encoded missing events, the model can overcome limitations of standard techniques for dealing with missing input values. The model abilities are demonstrated on synthetic data reflecting prototypical pedestrian tracking scenarios.