 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZeroCard: Cardinality Estimation with Zero Dependence on Target Databases -- No Data, No Query, No Retraining
Oct 09, 2025



Cardinality estimation is a fundamental task in database systems and plays a critical role in query optimization. Despite significant advances in learning-based cardinality estimation methods, most existing approaches remain difficult to generalize to new datasets due to their strong dependence on raw data or queries, thus limiting their practicality in real scenarios. To overcome these challenges, we argue that semantics in the schema may benefit cardinality estimation, and leveraging such semantics may alleviate these dependencies. To this end, we introduce ZeroCard, the first semantics-driven cardinality estimation method that can be applied without any dependence on raw data access, query logs, or retraining on the target database. Specifically, we propose to predict data distributions using schema semantics, thereby avoiding raw data dependence. Then, we introduce a query template-agnostic representation method to alleviate query dependence. Finally, we construct a large-scale query dataset derived from real-world tables and pretrain ZeroCard on it, enabling it to learn cardinality from schema semantics and predicate representations. After pretraining, ZeroCard's parameters can be frozen and applied in an off-the-shelf manner. We conduct extensive experiments to demonstrate the distinct advantages of ZeroCard and show its practical applications in query optimization. Its zero-dependence property significantly facilitates deployment in real-world scenarios.
DF-SLAM: A Deep-Learning Enhanced Visual SLAM System based on Deep Local Features
Jan 24, 2019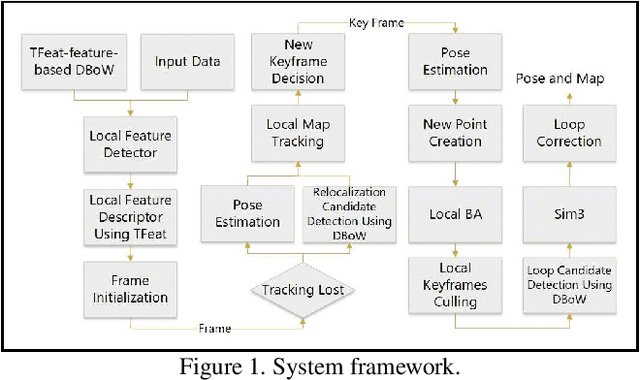
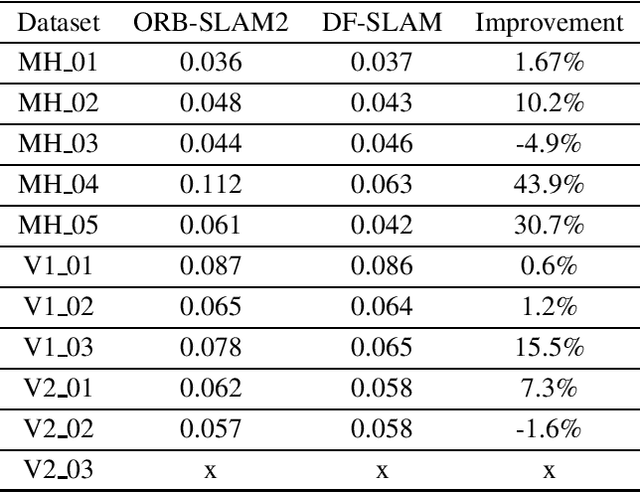
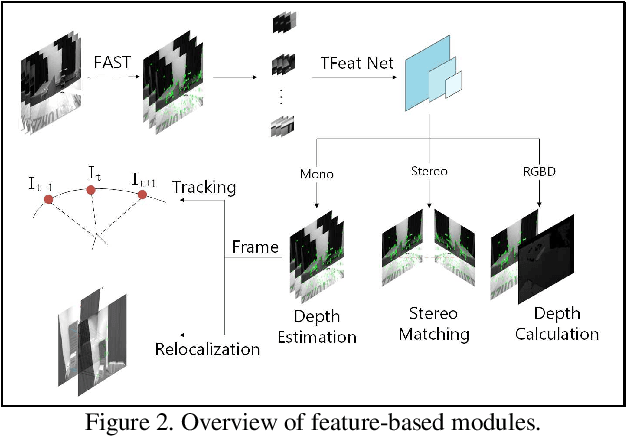
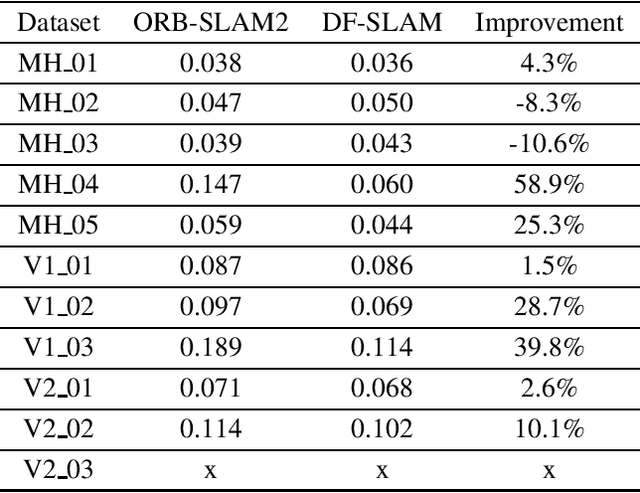
As the foundation of driverless vehicle and intelligent robots, Simultaneous Localization and Mapping(SLAM) has attracted much attention these days. However, non-geometric modules of traditional SLAM algorithms are limited by data association tasks and have become a bottleneck preventing the development of SLAM. To deal with such problems, many researchers seek to Deep Learning for help. But most of these studies are limited to virtual datasets or specific environments, and even sacrifice efficiency for accuracy. Thus, they are not practical enough. We propose DF-SLAM system that uses deep local feature descriptors obtained by the neural network as a substitute for traditional hand-made features. Experimental results demonstrate its improvements in efficiency and stability. DF-SLAM outperforms popular traditional SLAM systems in various scenes, including challenging scenes with intense illumination changes. Its versatility and mobility fit well into the need for exploring new environments. Since we adopt a shallow network to extract local descriptors and remain others the same as original SLAM systems, our DF-SLAM can still run in real-time on GPU.
Fine-grained Pattern Matching Over Streaming Time Series
Dec 01, 2017
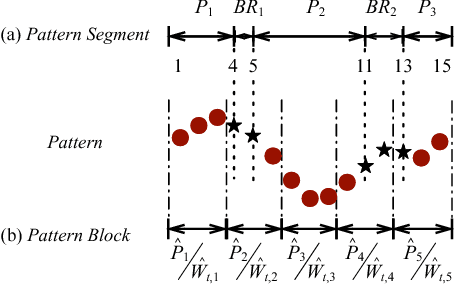
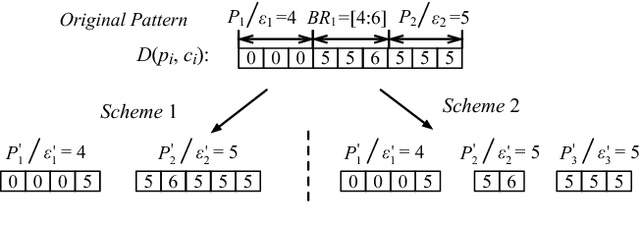

Pattern matching of streaming time series with lower latency under limited computing resource comes to a critical problem, especially as the growth of Industry 4.0 and Industry Internet of Things. However, against traditional single pattern matching problem, a pattern may contain multiple segments representing different statistical properties or physical meanings for more precise and expressive matching in real world. Hence, we formulate a new problem, called "fine-grained pattern matching", which allows users to specify varied granularities of matching deviation to different segments of a given pattern, and fuzzy regions for adaptive breakpoints determination between consecutive segments. In this paper, we propose a novel two-phase approach. In the pruning phase, we introduce Equal-Length Block (ELB) representation together with Block-Skipping Pruning (BSP) policy, which guarantees low cost feature calculation, effective pruning and no false dismissals. In the post-processing phase, a delta-function is proposed to enable us to conduct exact matching in linear complexity. Extensive experiments are conducted to evaluate on synthetic and real-world datasets, which illustrates that our algorithm outperforms the brute-force method and MSM, a multi-step filter mechanism over the multi-scaled representation.