 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy-Efficient Autonomous Aerial Navigation with Dynamic Vision Sensors: A Physics-Guided Neuromorphic Approach
Feb 09, 2025



Vision-based object tracking is a critical component for achieving autonomous aerial navigation, particularly for obstacle avoidance. Neuromorphic Dynamic Vision Sensors (DVS) or event cameras, inspired by biological vision, offer a promising alternative to conventional frame-based cameras. These cameras can detect changes in intensity asynchronously, even in challenging lighting conditions, with a high dynamic range and resistance to motion blur. Spiking neural networks (SNNs) are increasingly used to process these event-based signals efficiently and asynchronously. Meanwhile, physics-based artificial intelligence (AI) provides a means to incorporate system-level knowledge into neural networks via physical modeling. This enhances robustness, energy efficiency, and provides symbolic explainability. In this work, we present a neuromorphic navigation framework for autonomous drone navigation. The focus is on detecting and navigating through moving gates while avoiding collisions. We use event cameras for detecting moving objects through a shallow SNN architecture in an unsupervised manner. This is combined with a lightweight energy-aware physics-guided neural network (PgNN) trained with depth inputs to predict optimal flight times, generating near-minimum energy paths. The system is implemented in the Gazebo simulator and integrates a sensor-fused vision-to-planning neuro-symbolic framework built with the Robot Operating System (ROS) middleware. This work highlights the future potential of integrating event-based vision with physics-guided planning for energy-efficient autonomous navigation, particularly for low-latency decision-making.
EV-Planner: Energy-Efficient Robot Navigation via Event-Based Physics-Guided Neuromorphic Planner
Jul 21, 2023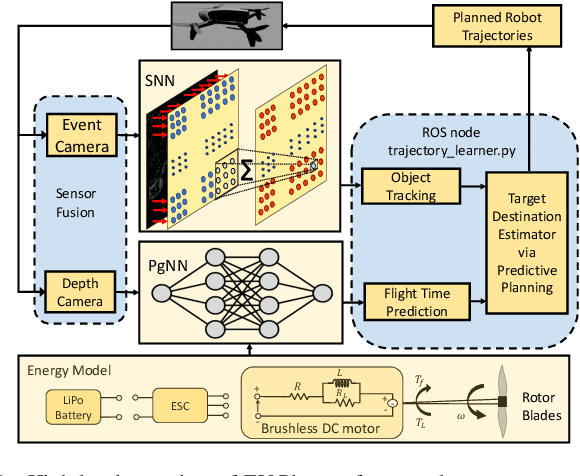
Vision-based object tracking is an essential precursor to performing autonomous aerial navigation in order to avoid obstacles. Biologically inspired neuromorphic event cameras are emerging as a powerful alternative to frame-based cameras, due to their ability to asynchronously detect varying intensities (even in poor lighting conditions), high dynamic range, and robustness to motion blur. Spiking neural networks (SNNs) have gained traction for processing events asynchronously in an energy-efficient manner. On the other hand, physics-based artificial intelligence (AI) has gained prominence recently, as they enable embedding system knowledge via physical modeling inside traditional analog neural networks (ANNs). In this letter, we present an event-based physics-guided neuromorphic planner (EV-Planner) to perform obstacle avoidance using neuromorphic event cameras and physics-based AI. We consider the task of autonomous drone navigation where the mission is to detect moving gates and fly through them while avoiding a collision. We use event cameras to perform object detection using a shallow spiking neural network in an unsupervised fashion. Utilizing the physical equations of the brushless DC motors present in the drone rotors, we train a lightweight energy-aware physics-guided neural network with depth inputs. This predicts the optimal flight time responsible for generating near-minimum energy paths. We spawn the drone in the Gazebo simulator and implement a sensor-fused vision-to-planning neuro-symbolic framework using Robot Operating System (ROS). Simulation results for safe collision-free flight trajectories are presented with performance analysis and potential future research directions
Towards End-to-End Deep Learning for Autonomous Racing: On Data Collection and a Unified Architecture for Steering and Throttle Prediction
May 04, 2021
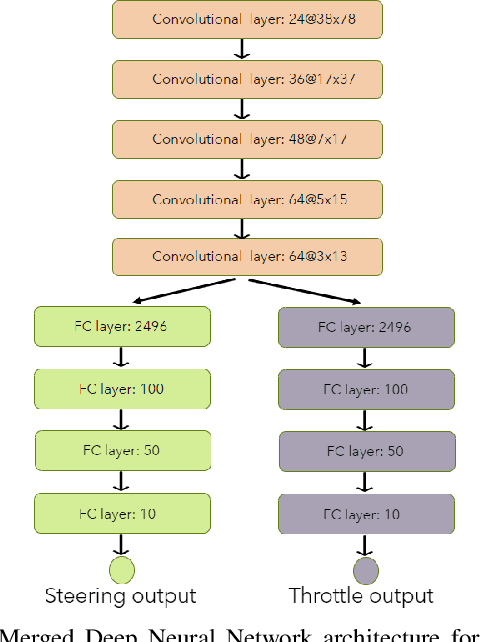

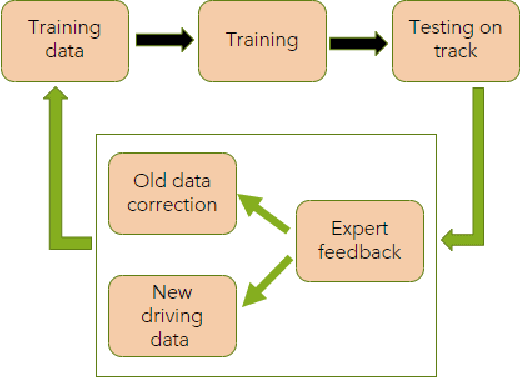
Deep Neural Networks (DNNs) which are trained end-to-end have been successfully applied to solve complex problems that we have not been able to solve in past decades. Autonomous driving is one of the most complex problems which is yet to be completely solved and autonomous racing adds more complexity and exciting challenges to this problem. Towards the challenge of applying end-to-end learning to autonomous racing, this paper shows results on two aspects: (1) Analyzing the relationship between the driving data used for training and the maximum speed at which the DNN can be successfully applied for predicting steering angle, (2) Neural network architecture and training methodology for learning steering and throttle without any feedback or recurrent connections.