 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Review of Full-Sized Autonomous Racing Vehicle Sensor Architecture
Feb 04, 2024In the landscape of technological innovation, autonomous racing is a dynamic and challenging domain that not only pushes the limits of technology, but also plays a crucial role in advancing and fostering a greater acceptance of autonomous systems. This paper thoroughly explores challenges and advances in autonomous racing vehicle design and performance, focusing on Roborace and the Indy Autonomous Challenge (IAC). This review provides a detailed analysis of sensor setups, architectural nuances, and test metrics on these cutting-edge platforms. In Roborace, the evolution from Devbot 1.0 to Robocar and Devbot 2.0 is detailed, revealing insights into sensor configurations and performance outcomes. The examination extends to the IAC, which is dedicated to high-speed self-driving vehicles, emphasizing developmental trajectories and sensor adaptations. By reviewing these platforms, the analysis provides valuable insight into autonomous driving racing, contributing to a broader understanding of sensor architectures and the challenges faced. This review supports future advances in full-scale autonomous racing technology.
Towards End-to-End Deep Learning for Autonomous Racing: On Data Collection and a Unified Architecture for Steering and Throttle Prediction
May 04, 2021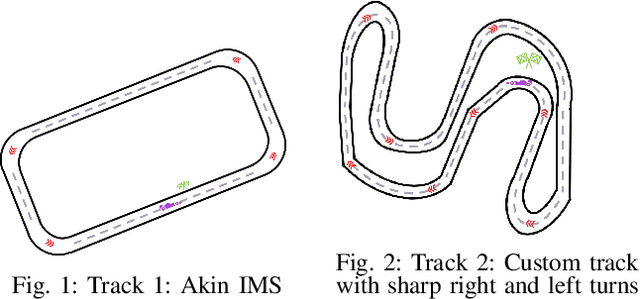
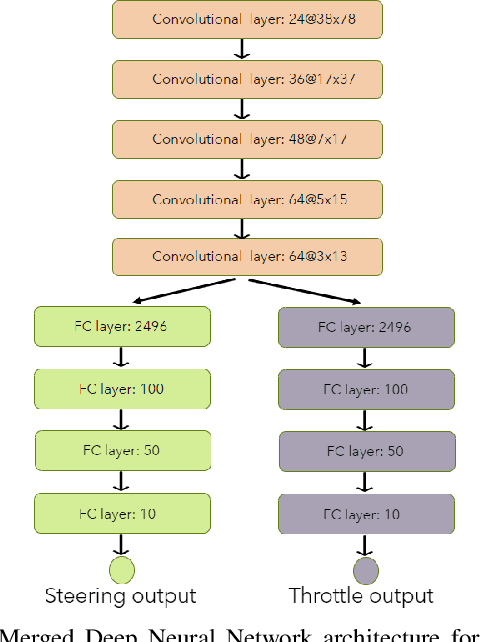

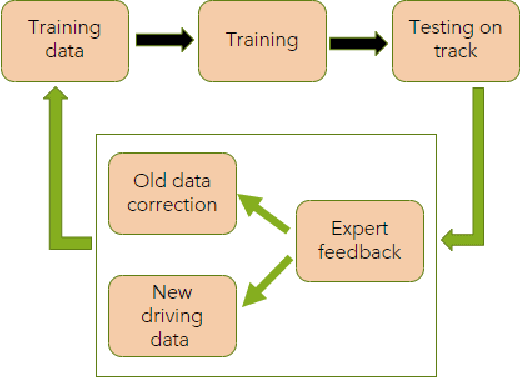
Deep Neural Networks (DNNs) which are trained end-to-end have been successfully applied to solve complex problems that we have not been able to solve in past decades. Autonomous driving is one of the most complex problems which is yet to be completely solved and autonomous racing adds more complexity and exciting challenges to this problem. Towards the challenge of applying end-to-end learning to autonomous racing, this paper shows results on two aspects: (1) Analyzing the relationship between the driving data used for training and the maximum speed at which the DNN can be successfully applied for predicting steering angle, (2) Neural network architecture and training methodology for learning steering and throttle without any feedback or recurrent connections.