 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards End-to-End Deep Learning for Autonomous Racing: On Data Collection and a Unified Architecture for Steering and Throttle Prediction
May 04, 2021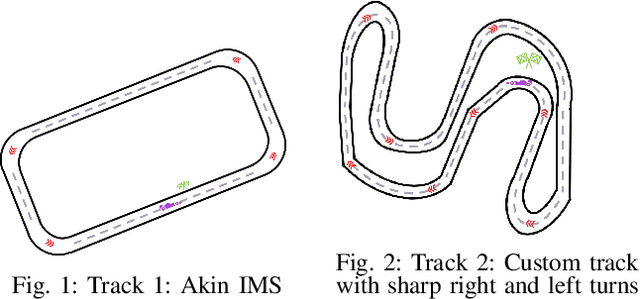
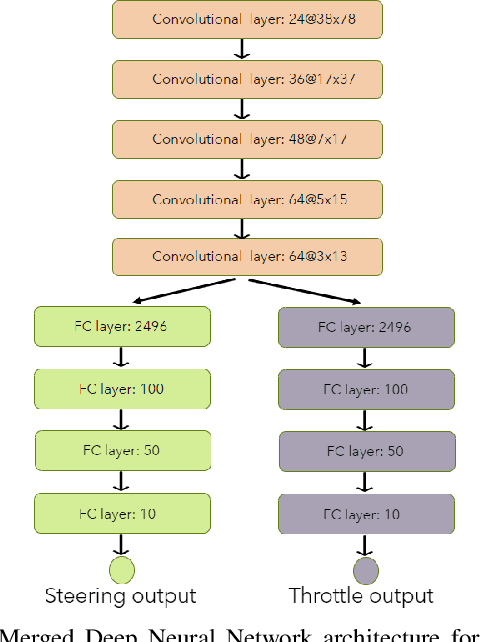

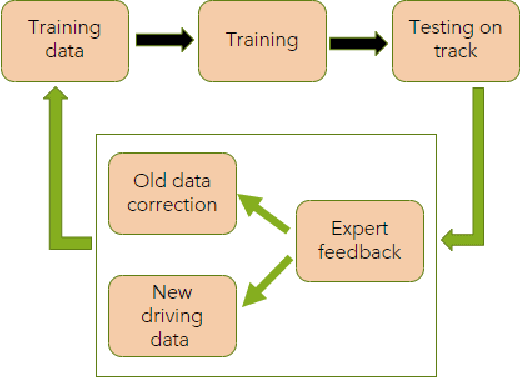
Deep Neural Networks (DNNs) which are trained end-to-end have been successfully applied to solve complex problems that we have not been able to solve in past decades. Autonomous driving is one of the most complex problems which is yet to be completely solved and autonomous racing adds more complexity and exciting challenges to this problem. Towards the challenge of applying end-to-end learning to autonomous racing, this paper shows results on two aspects: (1) Analyzing the relationship between the driving data used for training and the maximum speed at which the DNN can be successfully applied for predicting steering angle, (2) Neural network architecture and training methodology for learning steering and throttle without any feedback or recurrent connections.
Comparing Feedback Linearization and Adaptive Backstepping Control for Airborne Orientation of Agile Ground Robots using Wheel Reaction Torque
Sep 23, 2020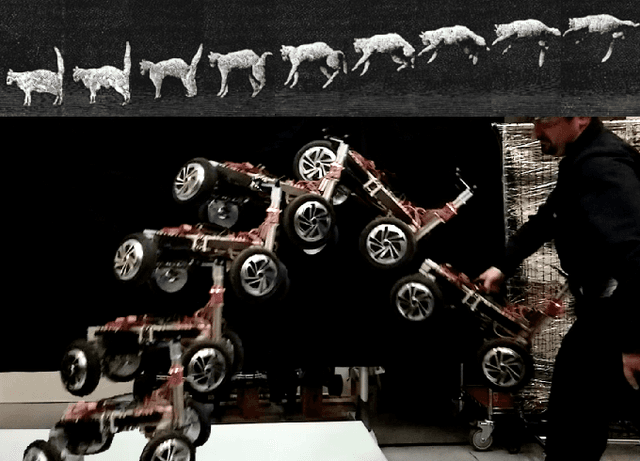
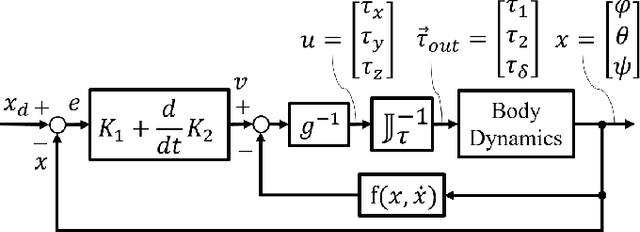
In this paper, two nonlinear methods for stabilizing the orientation of a Four-Wheel Independent Drive and Steering (4WIDS) robot while in the air are analyzed, implemented in simulation, and compared. AGRO (the Agile Ground Robot) is a 4WIDS inspection robot that can be deployed into unsafe environments by being thrown, and can use the reaction torque from its four wheels to command its orientation while in the air. Prior work has demonstrated on a hardware prototype that simple PD control with hand-tuned gains is sufficient, but hardly optimal, to stabilize the orientation in under 500ms. The goal of this work is to decrease the stabilization time and reject disturbances using nonlinear control methods. A model-based Feedback Linearization (FL) was added to compensate for the nonlinear Coriolis terms. However, with external disturbances, model uncertainty and sensor noise, the FL controller does not guarantee stability. As an alternative, a second controller was developed using backstepping methods with an adaptive compensator for external disturbances, model uncertainty, and sensor offset. The controller was designed using Lyapunov analysis. A simulation was written using the full nonlinear dynamics of AGRO in an isotropic steering configuration in which control authority over its pitch and roll are equalized. The PD+FL control method was compared to the backstepping control method using the same initial conditions in simulation. Both the backstepping controller and the PD+FL controller stabilized the system within 250 milliseconds. The adaptive backstepping controller was also able to achieve this performance with the adaptation law enabled and compensating for offset noisy sinusoidal disturbances.
Dynamics and Aerial Attitude Control for Rapid Emergency Deployment of the Agile Ground Robot AGRO
Jul 05, 2020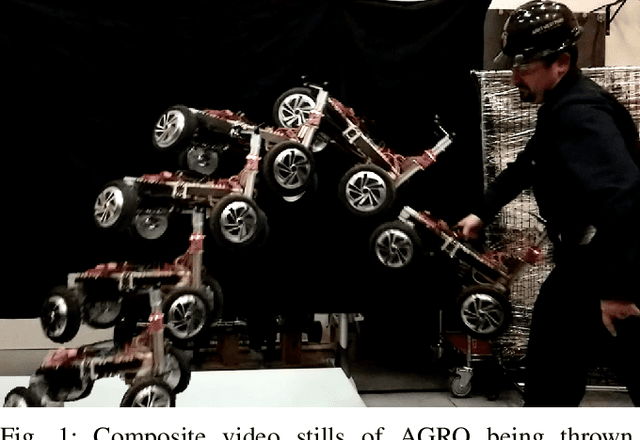
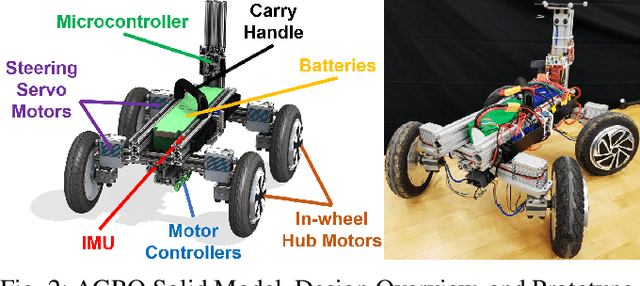
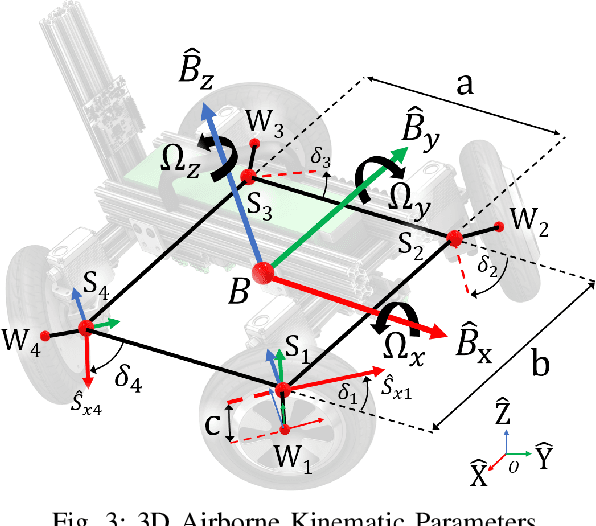
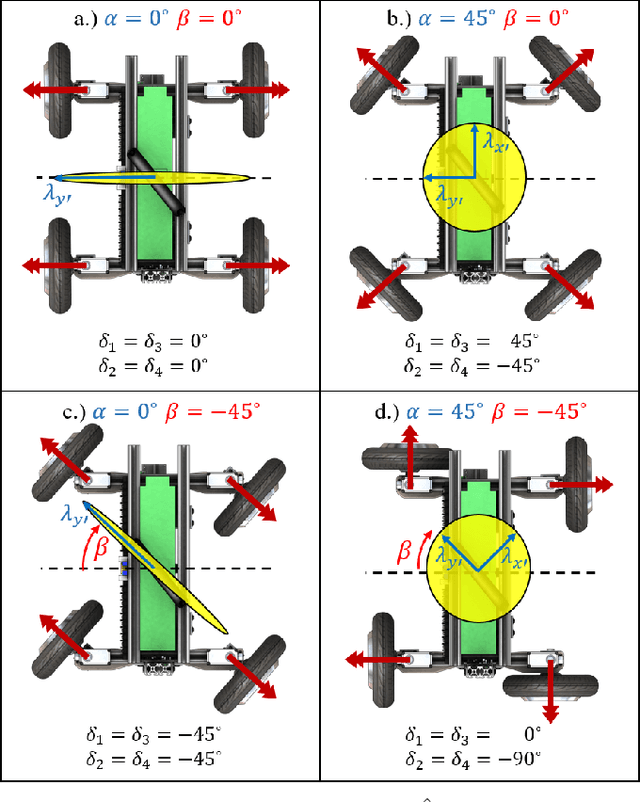
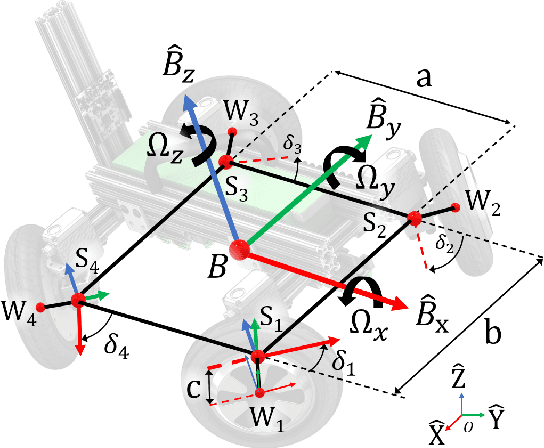
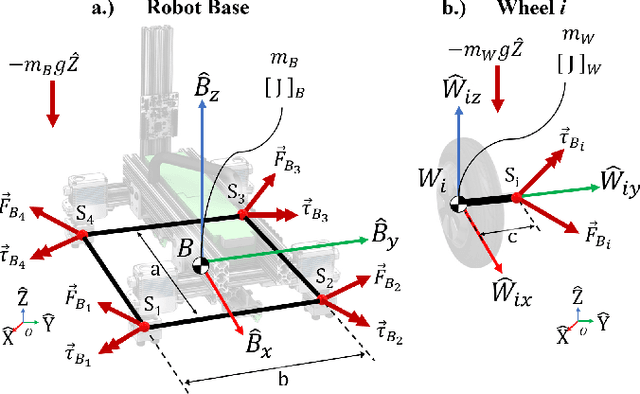
In this work we present a Four-Wheeled Independent Drive and Steering (4WIDS) robot named AGRO and a method of controlling its orientation while airborne using wheel reaction torques. This is the first documented use of independently steerable wheels to both drive on the ground and achieve aerial attitude control when thrown. Inspired by a cat's self-righting reflex, this capability was developed to allow emergency response personnel to rapidly deploy AGRO by throwing it over walls and fences or through windows without the risk of it landing upside down. It also allows AGRO to drive off of ledges and ensure it lands on all four wheels. We have demonstrated a successful thrown deployment of AGRO. A novel parametrization and singularity analysis of 4WIDS kinematics reveals independent yaw authority with simultaneous adjustment of the ratio between roll and pitch authority. Simple PD controllers allow for stabilization of roll, pitch, and yaw. These controllers were tested in a simulation using derived dynamic equations of motion, then implemented on the AGRO prototype. An experiment comparing a controlled and non-controlled fall was conducted in which AGRO was dropped from a height of 0.85 m with an initial roll and pitch angle of 16 degrees and -23 degrees respectively. With the controller enabled, AGRO can use the reaction torque from its wheels to stabilize its orientation within 402 milliseconds.
Passive Quadrupedal Gait Synchronization for Extra Robotic Legs Using a Dynamically Coupled Double Rimless Wheel Model
Jul 02, 2020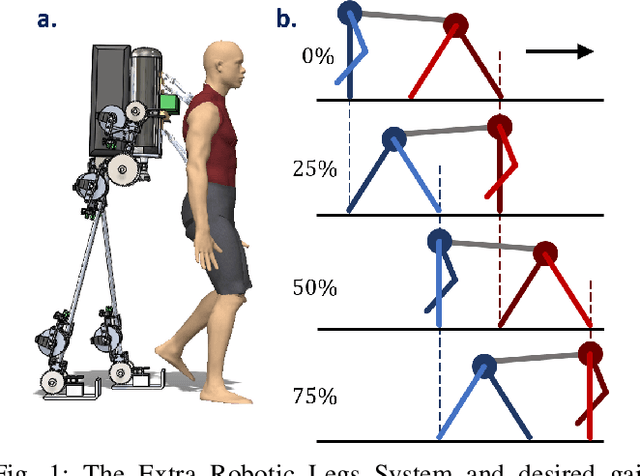
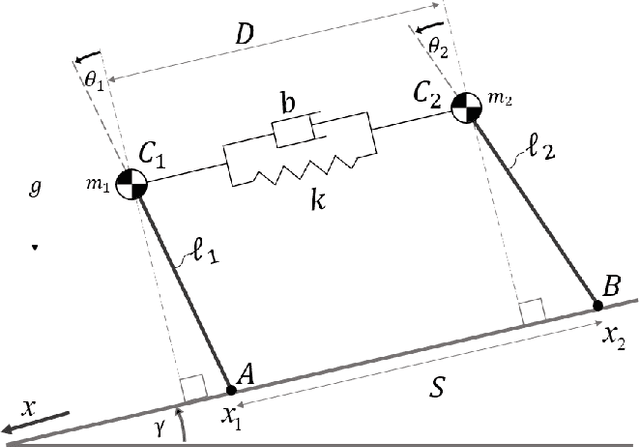
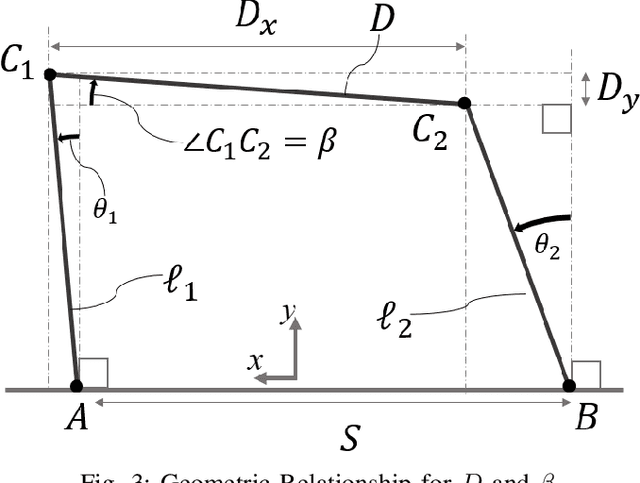
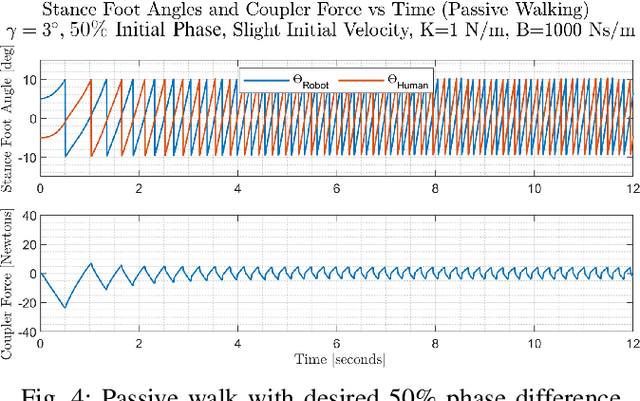
The Extra Robotic Legs (XRL) system is a robotic augmentation worn by a human operator consisting of two articulated robot legs that walk with the operator and help bear a heavy backpack payload. It is desirable for the Human-XRL quadruped system to walk with the rear legs lead the front by 25% of the gait period, minimizing the energy lost from foot impacts while maximizing balance stability. Unlike quadrupedal robots, the XRL cannot command the human's limbs to coordinate quadrupedal locomotion. Using a pair of Rimless Wheel models, it is shown that the systems coupled with a spring and damper converge to the desired 25% phase difference. A Poincar\'e return map was generated using numerical simulation to examine the convergence properties to different coupler design parameters, and initial conditions. The Dynamically Coupled Double Rimless Wheel system was physically realized with a spring and dashpot chosen from the theoretical results, and initial experiments indicate that the desired synchronization properties may be achieved within several steps using this set of passive components alone.
Hybrid Open-Loop Closed-Loop Control of Coupled Human-Robot Balance During Assisted Stance Transition with Extra Robotic Legs
Jul 02, 2020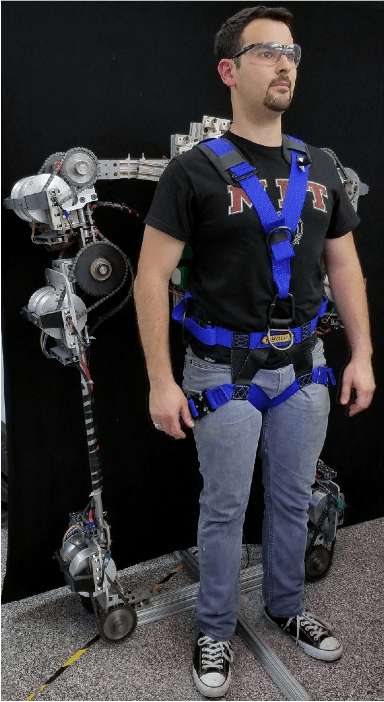

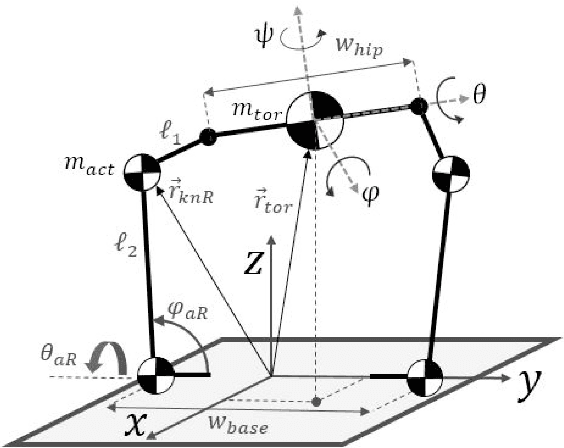
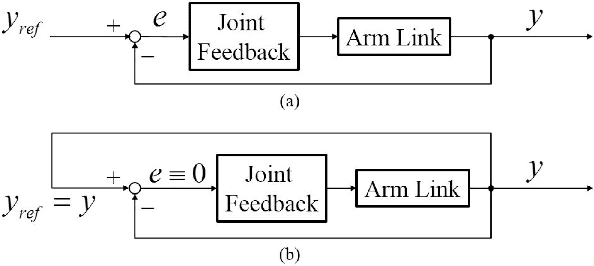
A new approach to the human-robot shared control of the Extra Robotic Legs (XRL) wearable augmentation system is presented. The XRL system consists of two extra legs that bear the entirety of its backpack payload, as well as some of the human operator's weight. The XRL System must support its own balance and assist the operator stably while allowing them to move in selected directions. In some directions of the task space the XRL must constrain the human motion with position feedback for balance, while in other directions the XRL must have no position feedback, so that the human can move freely. Here, we present Hybrid Open-Loop / Closed-Loop Control Architecture for mixing the two control modes in a systematic manner. The system is reduced to individual joint feedback control that is simple to implement and reliable against failure. The method is applied to the XRL system that assists a human in conducting a nuclear waste decommissioning task. A prototype XRL system has been developed and demonstrated with a simulated human performing the transition from standing to crawling and back again while coupled to the prototype XRL system.
Design of Extra Robotic Legs for Augmenting Human Payload Capabilities by Exploiting Singularity and Torque Redistribution
Jul 02, 2020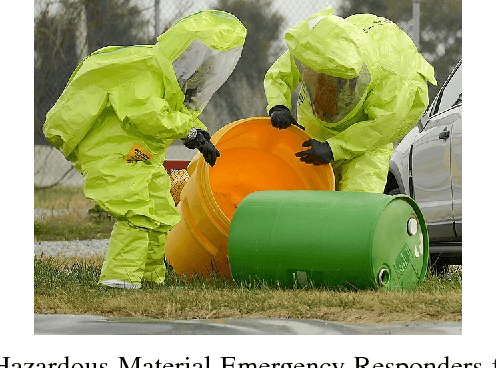
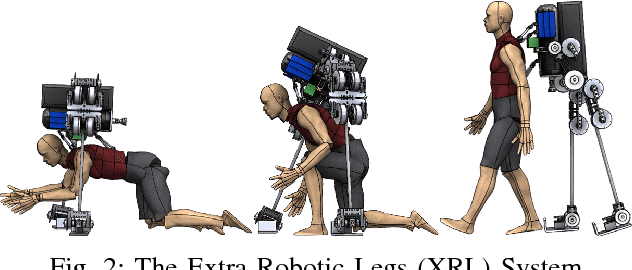
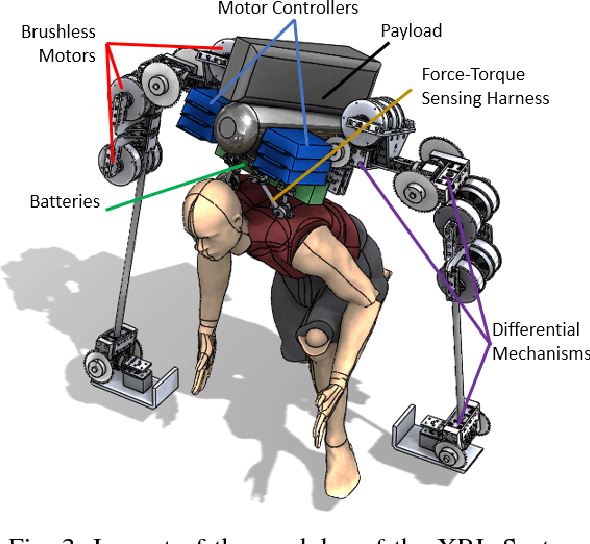
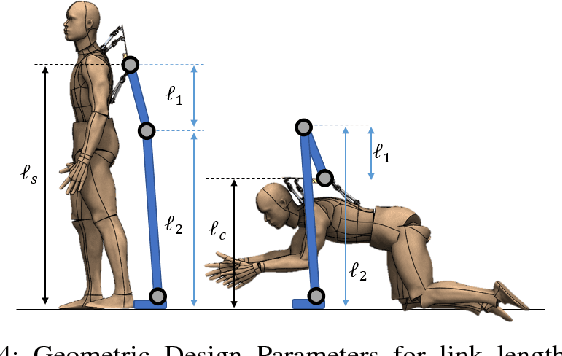
We present the design of a new robotic human augmentation system that will assist the operator in carrying a heavy payload, reaching and maintaining difficult postures, and ultimately better performing their job. The Extra Robotic Legs (XRL) system is worn by the operator and consists of two articulated robotic legs that move with the operator to bear a heavy payload. The design was driven by a need to increase the effectiveness of hazardous material emergency response personnel who are encumbered by their personal protective equipment (PPE). The legs will ultimately walk, climb stairs, crouch down, and crawl with the operator while eliminating all external PPE loads on the operator. The forces involved in the most extreme loading cases were analyzed to find an effective strategy for reducing actuator loads. The analysis reveals that the maximum torque is exerted during the transition from the crawling to standing mode of motion. Peak torques are significantly reduced by leveraging redundancy in force application resulting from a closed-loop kinematic chain formed by a particular posture of the XRL. The actuators, power systems, and transmission elements were designed from the results of these analyses. Using differential mechanisms to combine the inputs of multiple actuators into a single degree of freedom, the gear reductions needed to bear the heavy loads could be kept at a minimum, enabling high bandwidth force control due to the near-direct-drive transmission. A prototype was fabricated utilizing the insights gained from these analyses and initial tests indicate the feasibility of the XRL system.
Design and Analysis of 6-DOF Triple Scissor Extender Robots with Applications in Aircraft Assembly
Jul 02, 2020



A new type of parallel robot mechanism with an extendable structure is presented, and its kinematic properties and design parameters are analyzed. The Triple Scissor Extender (TSE) is a 6 Degree-Of-Freedom robotic mechanism for reaching high ceilings and positioning an end effector. Three scissor mechanisms are arranged in parallel, with the bottom ends coupled to linear slides, and the top vertex attached to an end effector plate. Arbitrary positions and orientations of the end effector can be achieved through the coordinated motion of the six linear actuators located at the base. By changing key geometric parameters, the TSE's design can yield a specific desired workspace volume and differential motion behavior. A general kinematic model for diverse TSEs is derived, and the kinematic properties, including workspace, singularity, and the Jacobian singular values, are evaluated. From these expressions, four key design parameters are identified, and their sensitivity upon the workspace volume and the Jacobian singular values is analyzed. A case study in autonomous aircraft assembly is presented using the insights gained from the design parameter studies.
Triple Scissor Extender: A 6-DOF Lifting and Positioning Robot
Jul 02, 2020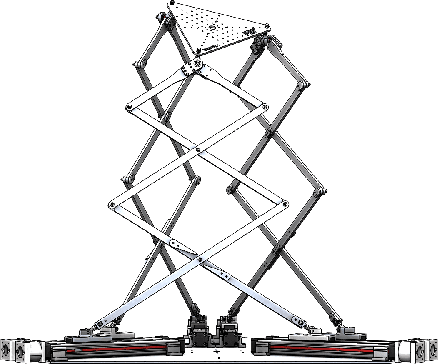
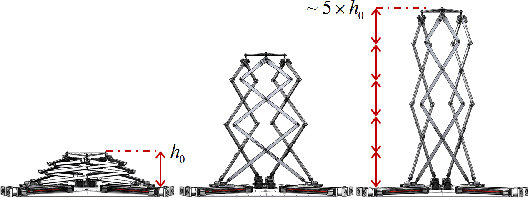
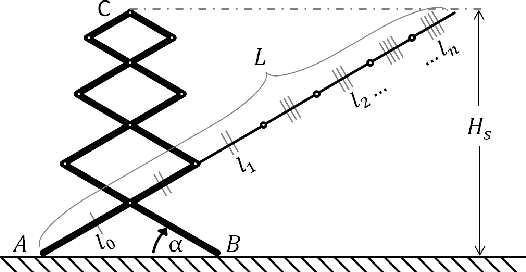
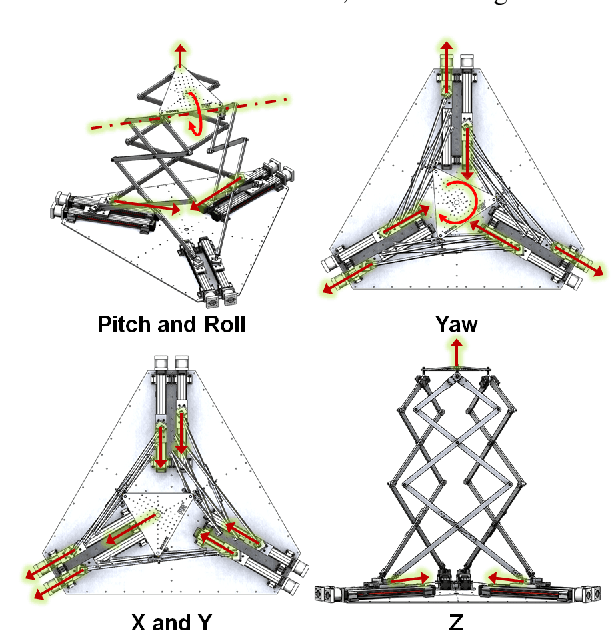
We present a novel 6 DOF robotic mechanism for reaching high ceilings and positioning an end-effector. The end-effector is supported with three scissor mechanisms that extend towards the ceiling with 6 independent linear actuators moving the base ends of the individual scissors. The top point of each scissor is connected to one of three ball joints located at the three vertices of the top triangular plate holding the end-effector. Coordinated motion of the 6 linear actuators at the base allows the end-effector to reach an arbitrary position with an arbitrary orientation. The design concept of the Triple Scissor Extender is presented, followed by kinematic modeling and analysis of the the Inverse Jacobian relating actuator velocities to the end-effector velocities. The Inverse Jacobian eigenvalues are determined for diverse configurations in order to characterize the kinematic properties. A proof-of-concept prototype has been designed and built. The Inverse Jacobian for use in differential control is evaluated through experiments.