 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Open-Loop Closed-Loop Control of Coupled Human-Robot Balance During Assisted Stance Transition with Extra Robotic Legs
Paper and Code
Jul 02, 2020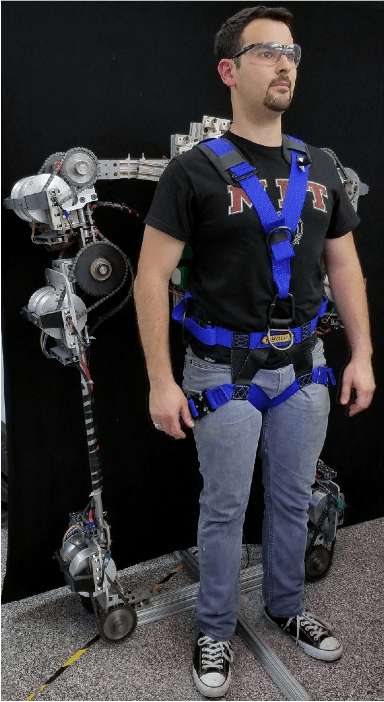

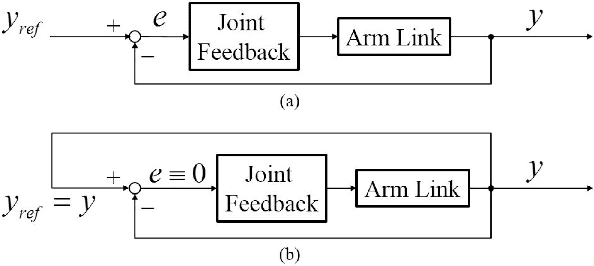
A new approach to the human-robot shared control of the Extra Robotic Legs (XRL) wearable augmentation system is presented. The XRL system consists of two extra legs that bear the entirety of its backpack payload, as well as some of the human operator's weight. The XRL System must support its own balance and assist the operator stably while allowing them to move in selected directions. In some directions of the task space the XRL must constrain the human motion with position feedback for balance, while in other directions the XRL must have no position feedback, so that the human can move freely. Here, we present Hybrid Open-Loop / Closed-Loop Control Architecture for mixing the two control modes in a systematic manner. The system is reduced to individual joint feedback control that is simple to implement and reliable against failure. The method is applied to the XRL system that assists a human in conducting a nuclear waste decommissioning task. A prototype XRL system has been developed and demonstrated with a simulated human performing the transition from standing to crawling and back again while coupled to the prototype XRL system.