 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Marker Search for Autonomous Drone Landing in Diverse Urban Environments
Jan 16, 2026Marker-based landing is widely used in drone delivery and return-to-base systems for its simplicity and reliability. However, most approaches assume idealized landing site visibility and sensor performance, limiting robustness in complex urban settings. We present a simulation-based evaluation suite on the AirSim platform with systematically varied urban layouts, lighting, and weather to replicate realistic operational diversity. Using onboard camera sensors (RGB for marker detection and depth for obstacle avoidance), we benchmark two heuristic coverage patterns and a reinforcement learning-based agent, analyzing how exploration strategy and scene complexity affect success rate, path efficiency, and robustness. Results underscore the need to evaluate marker-based autonomous landing under diverse, sensor-relevant conditions to guide the development of reliable aerial navigation systems.
Towards Robust Autonomous Landing Systems: Iterative Solutions and Key Lessons Learned
May 18, 2025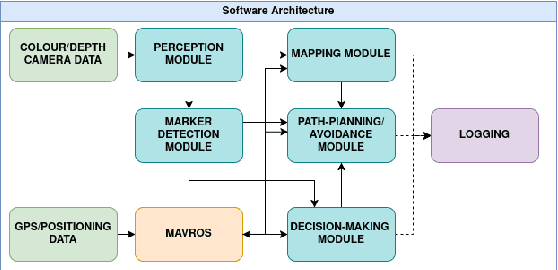
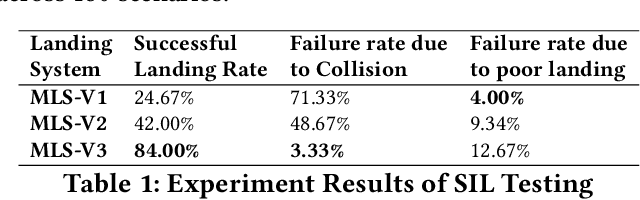
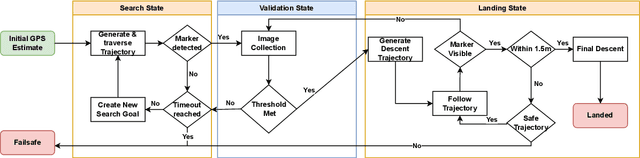
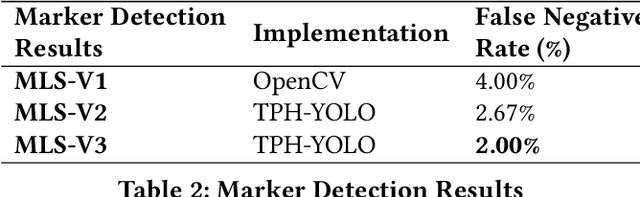
Uncrewed Aerial Vehicles (UAVs) have become a focal point of research, with both established companies and startups investing heavily in their development. This paper presents our iterative process in developing a robust autonomous marker-based landing system, highlighting the key challenges encountered and the solutions implemented. It reviews existing systems for autonomous landing processes, and through this aims to contribute to the community by sharing insights and challenges faced during development and testing.
Sensor Fusion for Autonomous Indoor UAV Navigation in Confined Spaces
Oct 27, 2024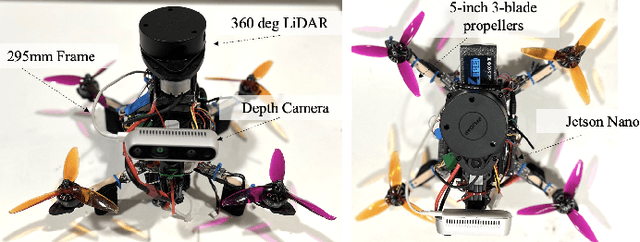
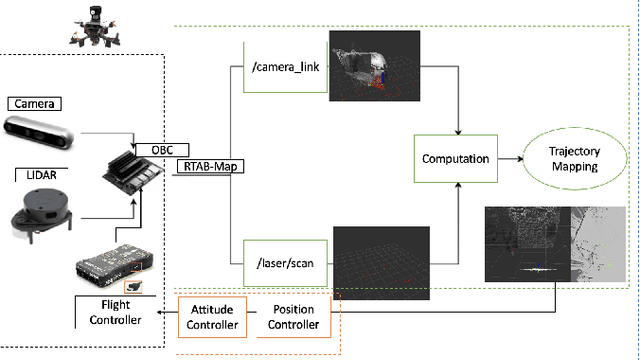
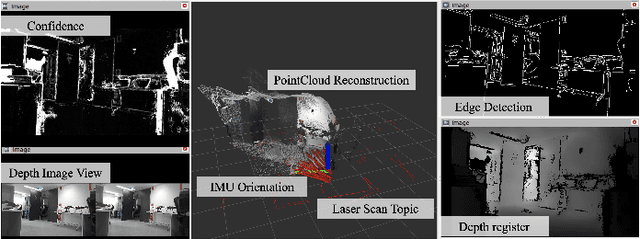
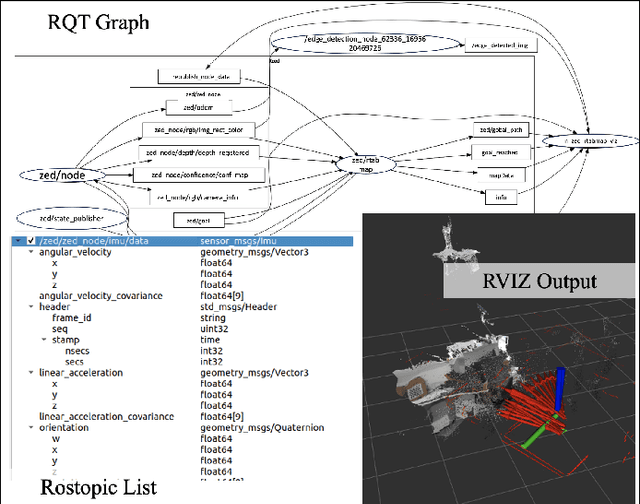
In this paper, we address the challenge of navigating through unknown indoor environments using autonomous aerial robots within confined spaces. The core of our system involves the integration of key sensor technologies, including depth sensing from the ZED 2i camera, IMU data, and LiDAR measurements, facilitated by the Robot Operating System (ROS) and RTAB-Map. Through custom designed experiments, we demonstrate the robustness and effectiveness of this approach. Our results showcase a promising navigation accuracy, with errors as low as 0.4 meters, and mapping quality characterized by a Root Mean Square Error (RMSE) of just 0.13 m. Notably, this performance is achieved while maintaining energy efficiency and balanced resource allocation, addressing a crucial concern in UAV applications. Flight tests further underscore the precision of our system in maintaining desired flight orientations, with a remarkable error rate of only 0.1%. This work represents a significant stride in the development of autonomous indoor UAV navigation systems, with potential applications in search and rescue, facility inspection, and environmental monitoring within GPS-denied indoor environments.
Aerodynamics and Sensing Analysis for Efficient Drone-Based Parcel Delivery
Oct 27, 2024



In an era of rapid urbanization and e-commerce growth, efficient parcel delivery methods are crucial. This paper presents a detailed study of the aerodynamics and sensing analysis of drones for parcel delivery. Utilizing Computational Fluid Dynamics (CFD), the study offers a comprehensive airflow analysis, revealing the aerodynamic forces affecting drone stability due to payload capacity. A multidisciplinary approach is employed, integrating mechanical design, control theory, and sensing systems to address the complex issue of parcel positioning. The experimental validation section rigorously tests different size payloads and their positions and impact on drones with maximum thrusts of 2000 gf. The findings prove the drone's capacity to lift a large payload that covers up to 50 percent of the propeller, thereby contributing to optimizing drone designs and sustainable parcel delivery systems. It has been observed that the drone can lift a large payload smoothly when placed above the drone, with an error rate as low as 0.1 percent for roll, pitch, and yaw. This work paved the way for more versatile, real-world applications of drone technology, setting a new standard in the field.
AeroBridge: Autonomous Drone Handoff System for Emergency Battery Service
Mar 25, 2024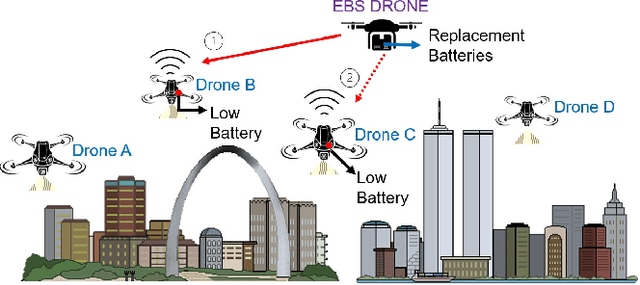
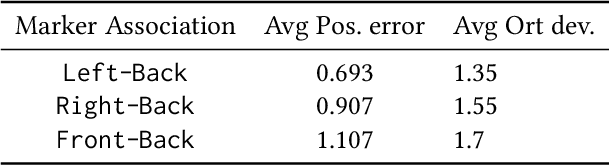
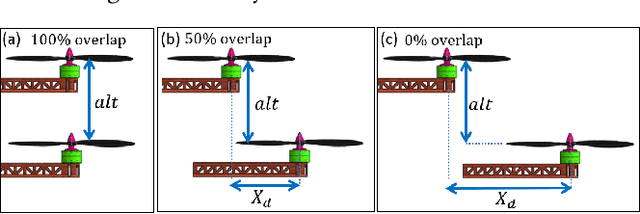
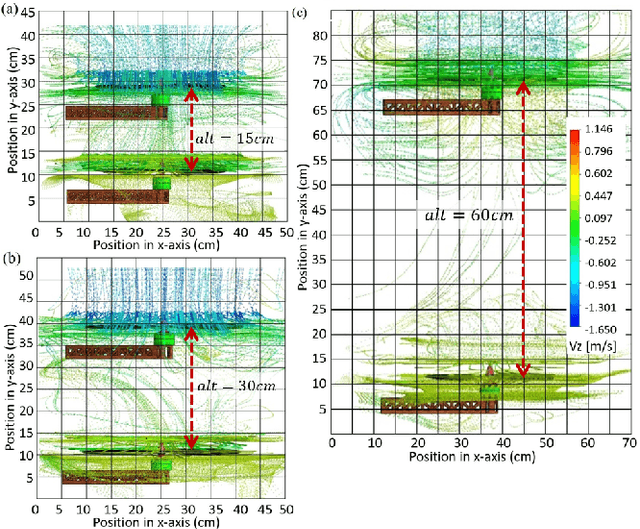
This paper proposes an Emergency Battery Service (EBS) for drones in which an EBS drone flies to a drone in the field with a depleted battery and transfers a fresh battery to the exhausted drone. The authors present a unique battery transfer mechanism and drone localization that uses the Cross Marker Position (CMP) method. The main challenges include a stable and balanced transfer that precisely localizes the receiver drone. The proposed EBS drone mitigates the effects of downwash due to the vertical proximity between the drones by implementing diagonal alignment with the receiver, reducing the distance to 0.5 m between the two drones. CFD analysis shows that diagonal instead of perpendicular alignment minimizes turbulence, and the authors verify the actual system for change in output airflow and thrust measurements. The CMP marker-based localization method enables position lock for the EBS drone with up to 0.9 cm accuracy. The performance of the transfer mechanism is validated experimentally by successful mid-air transfer in 5 seconds, where the EBS drone is within 0.5 m vertical distance from the receiver drone, wherein 4m/s turbulence does not affect the transfer process.
New Directions: Wireless Robotic Materials
Aug 15, 2017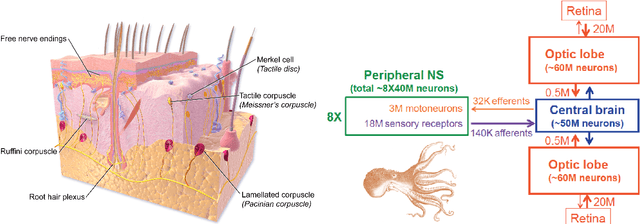
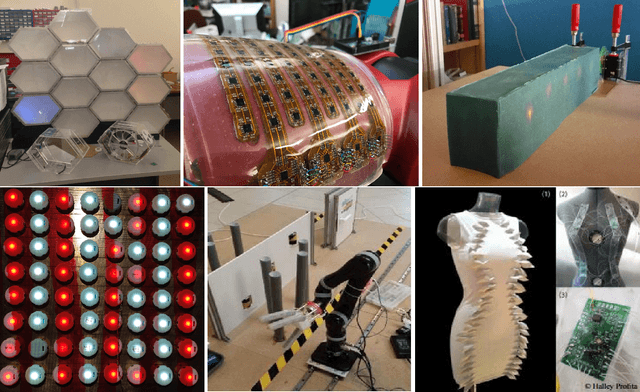
We describe opportunities and challenges with wireless robotic materials. Robotic materials are multi-functional composites that tightly integrate sensing, actuation, computation and communication to create smart composites that can sense their environment and change their physical properties in an arbitrary programmable manner. Computation and communication in such materials are based on miniature, possibly wireless, devices that are scattered in the material and interface with sensors and actuators inside the material. Whereas routing and processing of information within the material build upon results from the field of sensor networks, robotic materials are pushing the limits of sensor networks in both size (down to the order of microns) and numbers of devices (up to the order of millions). In order to solve the algorithmic and systems challenges of such an approach, which will involve not only computer scientists, but also roboticists, chemists and material scientists, the community requires a common platform - much like the "Mote" that bootstrapped the widespread adoption of the field of sensor networks - that is small, provides ample of computation, is equipped with basic networking functionalities, and preferably can be powered wirelessly.
SafeVchat: Detecting Obscene Content and Misbehaving Users in Online Video Chat Services
Jan 17, 2011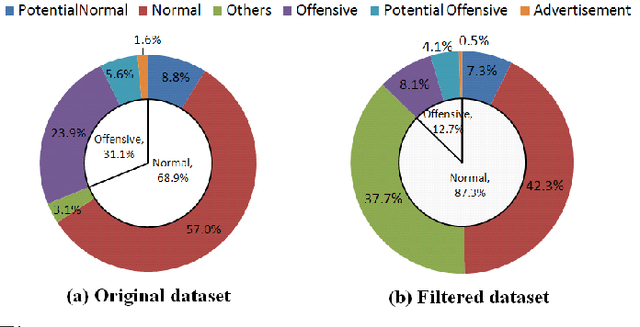

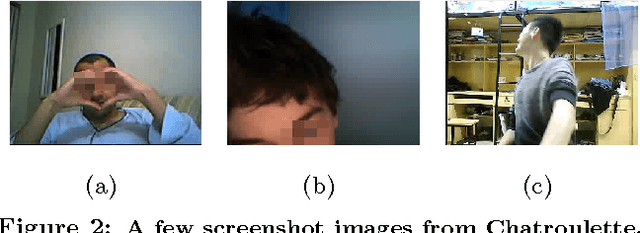
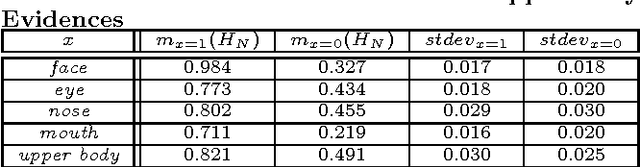
Online video chat services such as Chatroulette, Omegle, and vChatter that randomly match pairs of users in video chat sessions are fast becoming very popular, with over a million users per month in the case of Chatroulette. A key problem encountered in such systems is the presence of flashers and obscene content. This problem is especially acute given the presence of underage minors in such systems. This paper presents SafeVchat, a novel solution to the problem of flasher detection that employs an array of image detection algorithms. A key contribution of the paper concerns how the results of the individual detectors are fused together into an overall decision classifying the user as misbehaving or not, based on Dempster-Shafer Theory. The paper introduces a novel, motion-based skin detection method that achieves significantly higher recall and better precision. The proposed methods have been evaluated over real world data and image traces obtained from Chatroulette.com.