 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Visual Surrogate Compression for Alzheimer's Disease Classification
Jan 29, 2026High-dimensional structural MRI (sMRI) images are widely used for Alzheimer's Disease (AD) diagnosis. Most existing methods for sMRI representation learning rely on 3D architectures (e.g., 3D CNNs), slice-wise feature extraction with late aggregation, or apply training-free feature extractions using 2D foundation models (e.g., DINO). However, these three paradigms suffer from high computational cost, loss of cross-slice relations, and limited ability to extract discriminative features, respectively. To address these challenges, we propose Multimodal Visual Surrogate Compression (MVSC). It learns to compress and adapt large 3D sMRI volumes into compact 2D features, termed as visual surrogates, which are better aligned with frozen 2D foundation models to extract powerful representations for final AD classification. MVSC has two key components: a Volume Context Encoder that captures global cross-slice context under textual guidance, and an Adaptive Slice Fusion module that aggregates slice-level information in a text-enhanced, patch-wise manner. Extensive experiments on three large-scale Alzheimer's disease benchmarks demonstrate our MVSC performs favourably on both binary and multi-class classification tasks compared against state-of-the-art methods.
Sensor Fusion for Autonomous Indoor UAV Navigation in Confined Spaces
Oct 27, 2024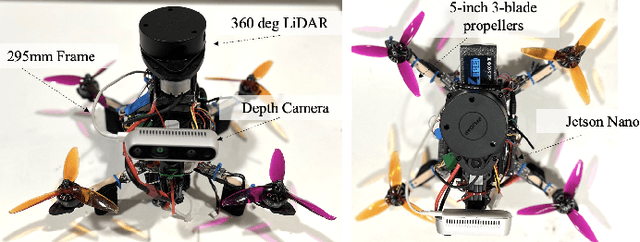
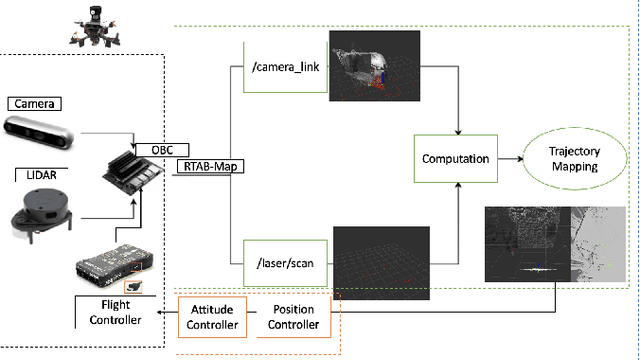
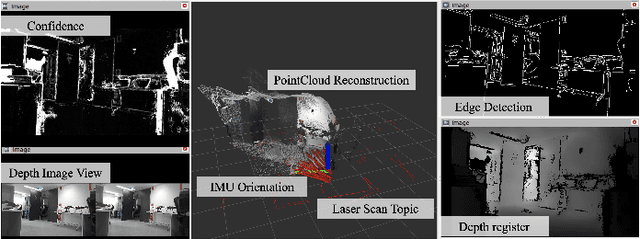
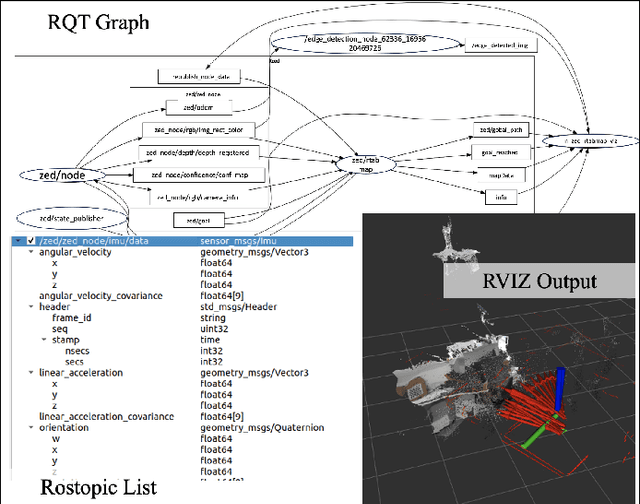
In this paper, we address the challenge of navigating through unknown indoor environments using autonomous aerial robots within confined spaces. The core of our system involves the integration of key sensor technologies, including depth sensing from the ZED 2i camera, IMU data, and LiDAR measurements, facilitated by the Robot Operating System (ROS) and RTAB-Map. Through custom designed experiments, we demonstrate the robustness and effectiveness of this approach. Our results showcase a promising navigation accuracy, with errors as low as 0.4 meters, and mapping quality characterized by a Root Mean Square Error (RMSE) of just 0.13 m. Notably, this performance is achieved while maintaining energy efficiency and balanced resource allocation, addressing a crucial concern in UAV applications. Flight tests further underscore the precision of our system in maintaining desired flight orientations, with a remarkable error rate of only 0.1%. This work represents a significant stride in the development of autonomous indoor UAV navigation systems, with potential applications in search and rescue, facility inspection, and environmental monitoring within GPS-denied indoor environments.
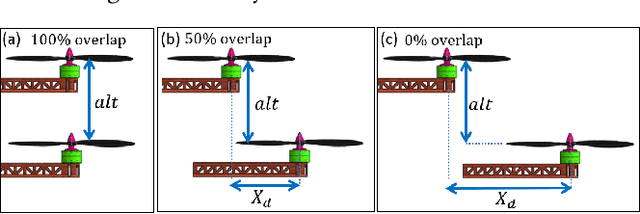
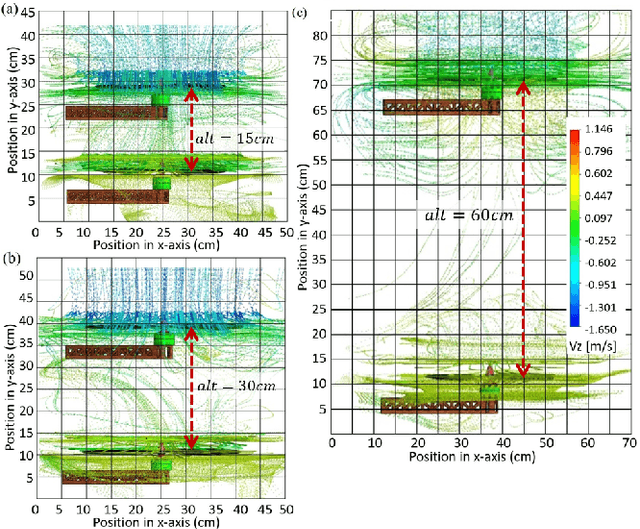
Aerodynamics and Sensing Analysis for Efficient Drone-Based Parcel Delivery
Oct 27, 2024



In an era of rapid urbanization and e-commerce growth, efficient parcel delivery methods are crucial. This paper presents a detailed study of the aerodynamics and sensing analysis of drones for parcel delivery. Utilizing Computational Fluid Dynamics (CFD), the study offers a comprehensive airflow analysis, revealing the aerodynamic forces affecting drone stability due to payload capacity. A multidisciplinary approach is employed, integrating mechanical design, control theory, and sensing systems to address the complex issue of parcel positioning. The experimental validation section rigorously tests different size payloads and their positions and impact on drones with maximum thrusts of 2000 gf. The findings prove the drone's capacity to lift a large payload that covers up to 50 percent of the propeller, thereby contributing to optimizing drone designs and sustainable parcel delivery systems. It has been observed that the drone can lift a large payload smoothly when placed above the drone, with an error rate as low as 0.1 percent for roll, pitch, and yaw. This work paved the way for more versatile, real-world applications of drone technology, setting a new standard in the field.
AeroBridge: Autonomous Drone Handoff System for Emergency Battery Service
Mar 25, 2024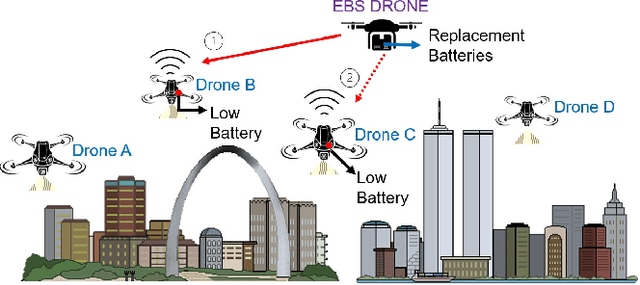
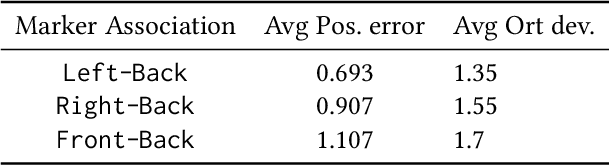
This paper proposes an Emergency Battery Service (EBS) for drones in which an EBS drone flies to a drone in the field with a depleted battery and transfers a fresh battery to the exhausted drone. The authors present a unique battery transfer mechanism and drone localization that uses the Cross Marker Position (CMP) method. The main challenges include a stable and balanced transfer that precisely localizes the receiver drone. The proposed EBS drone mitigates the effects of downwash due to the vertical proximity between the drones by implementing diagonal alignment with the receiver, reducing the distance to 0.5 m between the two drones. CFD analysis shows that diagonal instead of perpendicular alignment minimizes turbulence, and the authors verify the actual system for change in output airflow and thrust measurements. The CMP marker-based localization method enables position lock for the EBS drone with up to 0.9 cm accuracy. The performance of the transfer mechanism is validated experimentally by successful mid-air transfer in 5 seconds, where the EBS drone is within 0.5 m vertical distance from the receiver drone, wherein 4m/s turbulence does not affect the transfer process.