 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating Compounding Prediction Errors in Learned Dynamics Models
Mar 17, 2022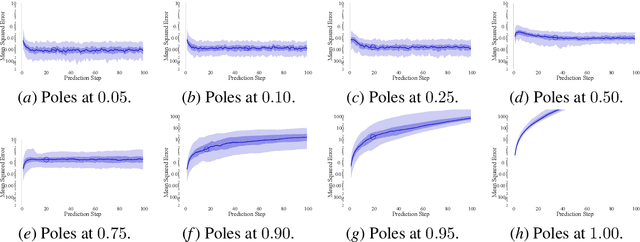
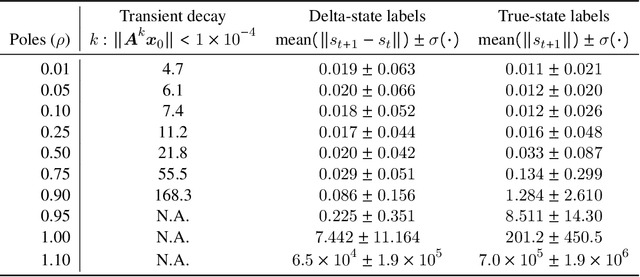
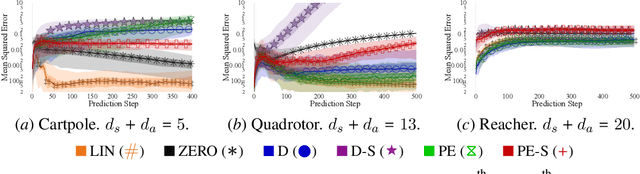
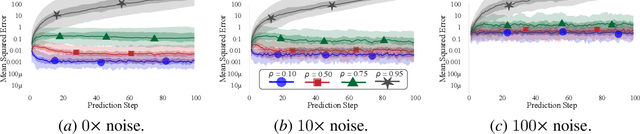
Accurately predicting the consequences of agents' actions is a key prerequisite for planning in robotic control. Model-based reinforcement learning (MBRL) is one paradigm which relies on the iterative learning and prediction of state-action transitions to solve a task. Deep MBRL has become a popular candidate, using a neural network to learn a dynamics model that predicts with each pass from high-dimensional states to actions. These "one-step" predictions are known to become inaccurate over longer horizons of composed prediction - called the compounding error problem. Given the prevalence of the compounding error problem in MBRL and related fields of data-driven control, we set out to understand the properties of and conditions causing these long-horizon errors. In this paper, we explore the effects of subcomponents of a control problem on long term prediction error: including choosing a system, collecting data, and training a model. These detailed quantitative studies on simulated and real-world data show that the underlying dynamics of a system are the strongest factor determining the shape and magnitude of prediction error. Given a clearer understanding of compounding prediction error, researchers can implement new types of models beyond "one-step" that are more useful for control.
Nonholonomic Yaw Control of an Underactuated Flying Robot with Model-based Reinforcement Learning
Sep 02, 2020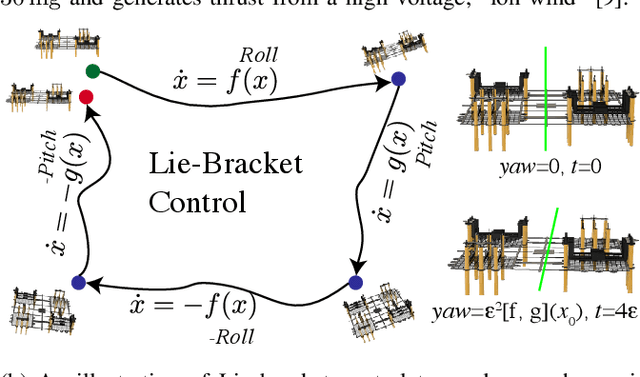
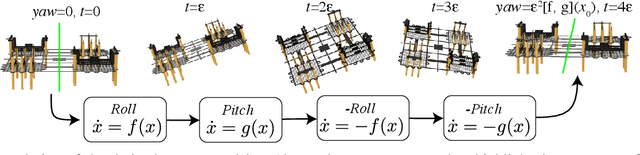
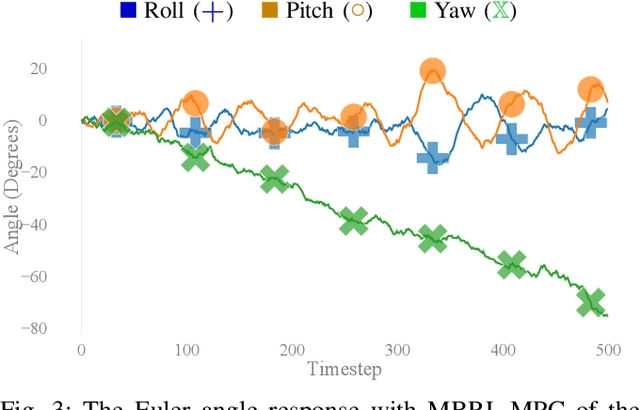
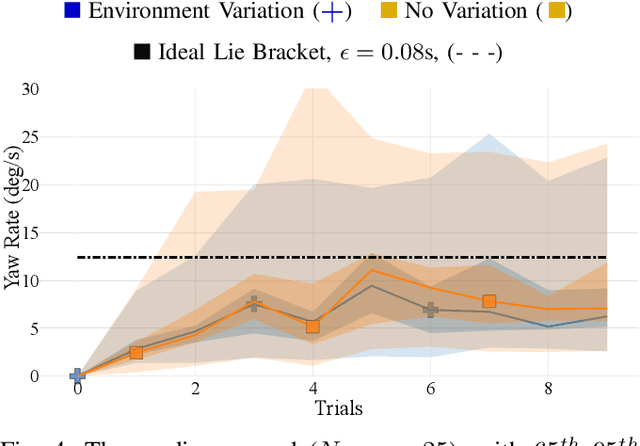
Nonholonomic control is a candidate to control nonlinear systems with path-dependant states. We investigate an underactuated flying micro-aerial-vehicle, the ionocraft, that requires nonholonomic control in the yaw-direction for complete attitude control. Deploying an analytical control law involves substantial engineering design and is sensitive to inaccuracy in the system model. With specific assumptions on assembly and system dynamics, we derive a Lie bracket for yaw control of the ionocraft. As a comparison to the significant engineering effort required for an analytic control law, we implement a data-driven model-based reinforcement learning yaw controller in a simulated flight task. We demonstrate that a simple model-based reinforcement learning framework can match the derived Lie bracket control (in yaw rate and chosen actions) in a few minutes of flight data, without a pre-defined dynamics function. This paper shows that learning-based approaches are useful as a tool for synthesis of nonlinear control laws previously only addressable through expert-based design.
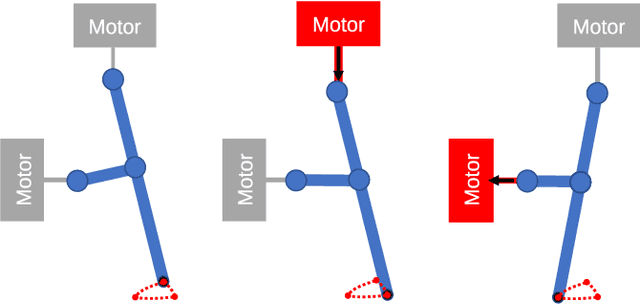
Data-efficient Learning of Morphology and Controller for a Microrobot
May 03, 2019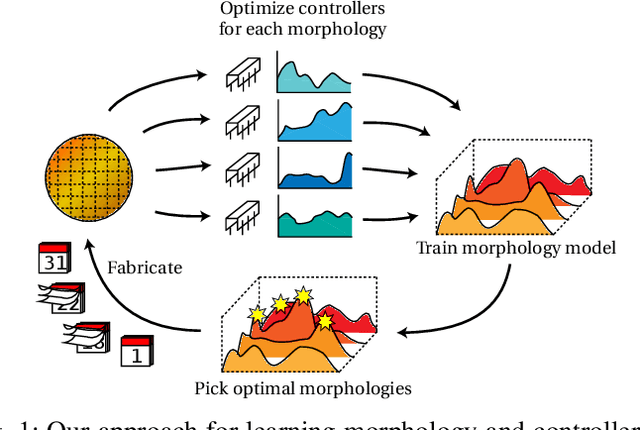
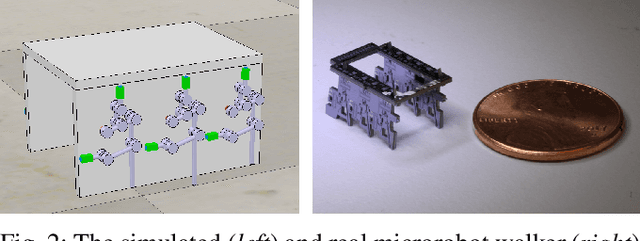
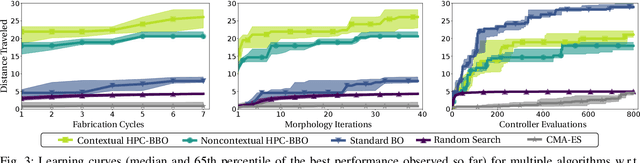
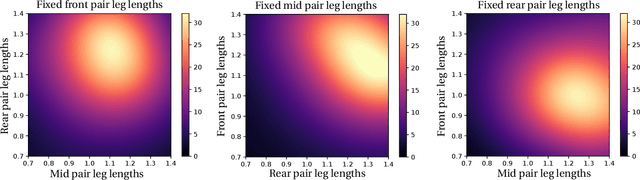
Robot design is often a slow and difficult process requiring the iterative construction and testing of prototypes, with the goal of sequentially optimizing the design. For most robots, this process is further complicated by the need, when validating the capabilities of the hardware to solve the desired task, to already have an appropriate controller, which is in turn designed and tuned for the specific hardware. In this paper, we propose a novel approach, HPC-BBO, to efficiently and automatically design hardware configurations, and evaluate them by also automatically tuning the corresponding controller. HPC-BBO is based on a hierarchical Bayesian optimization process which iteratively optimizes morphology configurations (based on the performance of the previous designs during the controller learning process) and subsequently learns the corresponding controllers (exploiting the knowledge collected from optimizing for previous morphologies). Moreover, HPC-BBO can select a "batch" of multiple morphology designs at once, thus parallelizing hardware validation and reducing the number of time-consuming production cycles. We validate HPC-BBO on the design of the morphology and controller for a simulated 6-legged microrobot. Experimental results show that HPC-BBO outperforms multiple competitive baselines, and yields a $360\%$ reduction in production cycles over standard Bayesian optimization, thus reducing the hypothetical manufacturing time of our microrobot from 21 to 4 months.
Learning Flexible and Reusable Locomotion Primitives for a Microrobot
Mar 01, 2018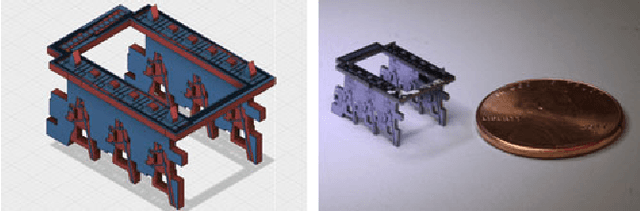
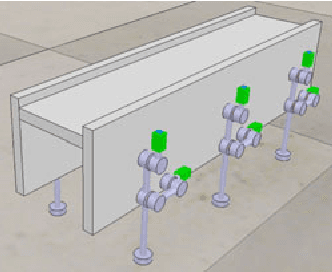
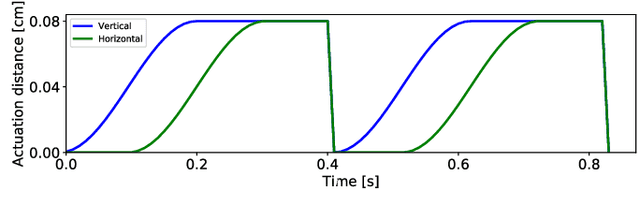
The design of gaits for robot locomotion can be a daunting process which requires significant expert knowledge and engineering. This process is even more challenging for robots that do not have an accurate physical model, such as compliant or micro-scale robots. Data-driven gait optimization provides an automated alternative to analytical gait design. In this paper, we propose a novel approach to efficiently learn a wide range of locomotion tasks with walking robots. This approach formalizes locomotion as a contextual policy search task to collect data, and subsequently uses that data to learn multi-objective locomotion primitives that can be used for planning. As a proof-of-concept we consider a simulated hexapod modeled after a recently developed microrobot, and we thoroughly evaluate the performance of this microrobot on different tasks and gaits. Our results validate the proposed controller and learning scheme on single and multi-objective locomotion tasks. Moreover, the experimental simulations show that without any prior knowledge about the robot used (e.g., dynamics model), our approach is capable of learning locomotion primitives within 250 trials and subsequently using them to successfully navigate through a maze.
New Directions: Wireless Robotic Materials
Aug 15, 2017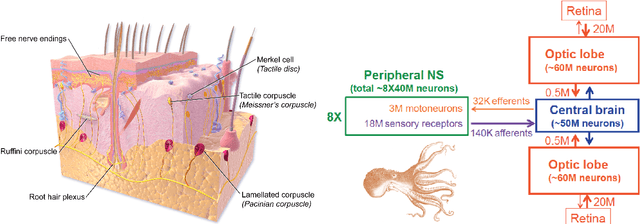
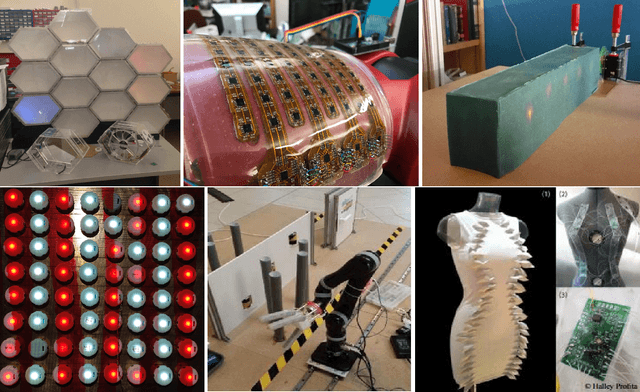
We describe opportunities and challenges with wireless robotic materials. Robotic materials are multi-functional composites that tightly integrate sensing, actuation, computation and communication to create smart composites that can sense their environment and change their physical properties in an arbitrary programmable manner. Computation and communication in such materials are based on miniature, possibly wireless, devices that are scattered in the material and interface with sensors and actuators inside the material. Whereas routing and processing of information within the material build upon results from the field of sensor networks, robotic materials are pushing the limits of sensor networks in both size (down to the order of microns) and numbers of devices (up to the order of millions). In order to solve the algorithmic and systems challenges of such an approach, which will involve not only computer scientists, but also roboticists, chemists and material scientists, the community requires a common platform - much like the "Mote" that bootstrapped the widespread adoption of the field of sensor networks - that is small, provides ample of computation, is equipped with basic networking functionalities, and preferably can be powered wirelessly.